犐犆犛29 .020
犑09
^^^^p^^^ɪ
中华人民共和国国家标准
犌犅/犜5226.7—2020
机械电气安全 机械电气设备
第7部分:工业机器人技术条件
犈犾犲犮狋狉犻犮犪犾狊犪犳犲狋狔狅犳犿犪犮犺犻狀犲狉狔—犈犾犲犮狋狉犻犮犪犾犲狇狌犻狆犿犲狀狋狅犳犿犪犮犺犻狀犲狊— 犘犪狉狋7:犚犲狇狌犻狉犲犿犲狀狋狊狅犳犻狀犱狌狊狋狉犻犪犾狉狅犫狅狋
2020-06-02 发布
2020-12-01 实施
国家市场监督管理总局労在 国家标准化管理委员会发布
犌犅/犜5226.7—2020
目 次
前言........................................................................................................................T
引言........................................................................................................................U
1 范围.....................................................................................................................1
2规范性引用文件......................................................................................................1
3术语和定义............................................................................................................3
4 一般要求...............................................................................................................5
5引入电源线端接法和切断开关....................................................................................8
6 电击防护...............................................................................................................10
7电气设备的保护......................................................................................................13
8等电位联结............................................................................................................13
9 控制电路和控制功能................................................................................................14
10操作板与控制器件................................................................................................16
11控制设备的位置、安装和电柜....................................................................................20
12导线和电缆 .........................................................................................................22
13 配线技术............................................................................................................22
14电动机及有关器件................................................................................................27
15 插座和照明 .........................................................................................................28
16 标记、警告标志和参照代号.......................................................................................28
17 技术文件............................................................................................................29
附录A (规范性附录)工业机器人电气设备/系统电磁兼容性(EMC)的要求与试验方法 ............31
参考文献 ..................................................................................................................38
前 言
犌犅/犜5226.7—2020
GB/T 5226《机械电气安全机械电气设备》分为如下部分:
——第1部分:通用技术条件;
——第6部分:建设机械技术条件;
——第7部分:工业机器人技术条件;
——第11部分:交流电压高于1 OOO V或直流电压高于1 500 V但不超过36 kV的通用技术 条件;
——第31部分:缝纫机、缝制单元和系统的特殊安全和EMC要求;
——第32部分:起重机械技术条件;
——第33部分:半导体设备技术条件;
——第34部分:机床技术条件;
本部分为GB/T 5226的第7部分。
本部分按照GB/T 1.1-2009给出的规则起草。
本部分由中国机械工业联合会提出。
本部分由全国工业机械电气系统标准化技术委员会(SAC/TC231)归口。
本部分起草单位:国家机床质量监督检验中心、固高科技(深圳)有限公司、广州数控设备有限公司、 琦星智能科技股份有限公司、上海电气集团股份有限公司中央研究院、济宁科力光电产业有限责任公 司、重庆固高科技长江研究院有限公司、中国石油大学(北京)、浙江明泉工业装备科技有限公司、江门市 固创科技有限公司、浙江新益智能驱动科技有限公司、浙江思纳克热流道科技有限公司、浙江宏恩智能 装备技术有限公司。
本部分主要起草人:黄祖广、薛瑞娟、蒋峥、龚小云、王金江、温尔文、吴文俊、陈忠、于俊贤、王政、 金维新、茅立安、李小虎、缪炳南、倪柏钢。
T
GB/T 5226.7—2020
引 言
GB/T 5226的本部分对工业机器人(包括工业机器人系统/单元)电气设备的安全提出了技术要求 和建议,以促进提高:
——人员和财产的安全性;
——控制响应的一致性;
——维护的便利性。
∏
犌犅/犜5226.7—2020
机械电气安全机械电气设备 第7部分:工业机器人技术条件
1范围
GB/T 5226的本部分规定了工业机器人用电气设备/系统的要求,包括一般要求、引入电源线端接 法和切断开关、电击防护、电气设备的保护、等电位联结、控制电路和控制功能、操作板与控制器件、控制 设备的位置和安装及电柜、导线和电缆、配线技术、电动机及其有关器件、插座和照明、标记和警告代号 及参照代号、技术文件等。
本部分适用于工业机器人(包括工业机器人系统/单元)的电气、电子和可编程序电子设备及系统 (以下简称“电气设备/系统”)的设计。
本部分适用的工业机器人电气设备/系统或电气设备/系统的部件,其标称电压不超过ACl OOO V 或DCl 5OO V,额定频率不超过2OO Hz。
注1:本部分是对GB/T 5226.1—2O19的补充和具体化。
注2:本部分所指的工业机器人电气设备/系统包括电柜、控制装置、驱动伺服装置(驱动器/驱动单元、电动机及传 感器等)、示教盒及通信接口等。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改清单)适用于本文件。
GB/T4O26—2O19人机界面标志标识的基本和安全规则设备端子、导体终端和导体的标识 (IEC60445:2017,IDT)
GB/T 42O8—2O17 外壳防护等级(IP 代码)(IEC 6O529 : 2O13,IDT)
GB/T 5226.1—2O19机械电气安全 机械电气设备 第1部分:通用技术条件(IEC6O2O41 : 2016,IDT)
GB/T 5465.2—2OO8电气设备用图形符号 第2部分:图形符号(IEC6O417DB: 2OO7,IDT)
GB/T6113.1O1—2O16无线电骚扰和抗扰度测量设备和测量方法规范 第1-1部分:无线电骚扰 和抗扰度测量设备测量设备(CISPR 16-1-1:2O1O,IDT)
GB/T 6113.1O2—2O18无线电骚扰和抗扰度测量设备和测量方法规范 第12部分:无线电骚扰 和抗扰度测量设备传导骚扰测量的耦合装置(CISPR 16-1-2:2O14,IDT)
GB/T 6113.1O4—2O16无线电骚扰和抗扰度测量设备和测量方法规范 第1-4部分:无线电骚扰 和抗扰度测量设备辐射骚扰测量用天线和试验场地(CISPR 16-1-4 :2O12,IDT)
GB/T 6113.2O1—2O18无线电骚扰和抗扰度测量设备和测量方法规范 第2-1部分:无线电骚扰 和抗扰度测量方法传导骚扰测量(CISPR 16-2-1:2O14,IDT)
GB/T 6113.2O3—2O16无线电骚扰和抗扰度测量设备和测量方法规范 第2-3部分:无线电骚扰 和抗扰度测量方法辐射骚扰测量(CISPR 16-2-3:2O1O,IDT)
GB/T 7251.1—2O13低压成套开关设备和控制设备 第1部分:总则(IEC 61439-1 :2O11,IDT)
GB/T 7947-2O1O 人机界面标志标识的基本和安全规则导体颜色或字母数字标识
(IEC60446:2007,IDT)
1
犌犅/犜5226.7—2020
GB 11291.1—2011工业环境用机器人 安全要求 第1部分:机器人(ISO10218-1: 2006 , IDT)
GB/ T
MOD)
GB/ T
GB/ T
GB/ T
GB/ T
GB/ T
11918.1—2014 工业用插头插座和耦合器 第1部分:通用要求(IEC 60309-1 : 2012,
12643-2013机器人与机器人装备词汇(IS() 8373 :2012 ,IDT)
13534—2009 颜色标志的代码(IEC 60757 : 1983 ,IDT)
14048.1—2012
14048.2—2008
14048.3—2017
低压开关设备和控制设备 低压开关设备和控制设备 低压开关设备和控制设备
第 1 部分:总则(IEC 60947-1:2011,M()D)
第 2 部分:断路器(IEC 60947-2:2006,IDT)
第3部分:开关、隔离器、隔离开关及熔断器组
合电器(IEC 60947-3 2015,IDT)
GB/T 14048.5—2017低压开关设备和控制设备 式控制电路电器(IEC 6094751 :2016,M((D)
第5-1部分:控制电路电器和开关元件 机电
GB/T 15969.6—2015可编程序控制器 第6部分:功能安全(IEC611316 : 2012 , IDT)
GB/T 16855.1—2018机械安全 控制系统安全相关部件 第1部分:设计通则(IS() 138491 :
2015,IDT)
GB/T 16895.21—2011低压电气装置 第4-41部分:安全防护 电击防护(IEC 60364441 :
2005,IDT)
GB/T 17045—2008电击防护装置和设备的通用部分(IEC 61140 : 2001,IDT)
GB/T 17626.3—2016电磁兼容试验和测量技术射频电磁场辐射抗扰度试验(IEC 61000-4-3: 2010,IDT)
GB/T 17626.6-2017电磁兼容试验和测量技术射频场感应的传导骚扰抗扰度(IEC 6100046: 2013,IDT)
GB/T 17626.8-2006电磁兼容试验和测量技术工频磁场的抗扰度试验(IEC 6100048 : 2001,IDT)
GB/T 18209.1—2010机械电气安全指示、标志和操作第1部分:关于视觉、听觉和触觉信号 的要求(IEC 613101:2007,IDT)
GB/T 18209.2—2010机械电气安全 指示、标志和操作 第2部分:标志要求(IEC613102: 2007,IDT)
GB/T 18209.3—2010机械电气安全 指示、标志和操作 第3部分:操动器的位置和操作的要 求(IEC 61310-3:2007,IDT)
GB/T 19212.1—2016变压器、电抗器、电源装置及其组合的安全 第1部分:通用要求和试验
(IEC 6155812009,M((D)
GB/T 19212.7—2012电源电压为1 100V及以下的变压器、电抗器、电源装置和类似产品的安全
第7部分:安全隔离变压器和内装安全隔离变压器的电源装置的特殊要求和试验(IEC 61558-2-6: 2009,IDT)
GB/T 19529-2004 技术信息与文件的构成(IEC 62023 : 2000,IDT)
GB/T 20438.1—2017电气/电子/可编程电子安全相关系统的功能安全 第1部分:一般要求 (IEC 6150812010,IDT)
GB/T 21067-2007工业机械电气设备电磁兼容通用抗扰度要求
GB/T 22840-2008工业机械电气设备浪涌抗扰度试验规范
GB/T 22841-2008工业机械电气设备电压暂降和短时中断抗扰度试验规范
GB 23313-2009工业机械电气设备电磁兼容发射限值
GB/T 24111-2009工业机械电气设备电快速瞬变脉冲群抗扰度试验规范
GB/T 24112-2009工业机械电气设备静电放电抗扰度试验规范
2
犌犅/犜5226.7—2020
GB 28526-2012 机械电气安全安全相关电气、电子和可编程电子控制系统的功能安全 (IEC62061:2005,IDT)
3术语和定义
GB/T 5226.1—2019、GB/T 12643—2013界定的以及下列术语和定义适用于本文件。为便于使 用,以下重复列出了 GB/T 5226.1—2019及GB/T 12643-2013中的某些术语和定义。
3.1
风险risk
在危险状态下,可能损伤或危害健康的概率和程度的综合。
[GB/T 5226.1—2019,定义 3.1.54]
3.2
电气设备 electrical eqIiipment
将机械或机械部件(例如:材料、装置、器件、卡具、仪器及类似物件)用于电连接的装置。
[GB∕T 5226.1—2019,定义 3.1.25]
3.3
危险hazard
伤害身体或损害健康的潜在源。
注1: “危险”一词可由其起源(例如:机械危险和电气危险),或其潜在伤害的性质(例如:电击危险、切割危险、中毒 危险和火灾危险)进行限定。
注2:危险有如下定义:
--危险既可以一直存在于机械的预期使用中(如危险运动部件的运动、焊接过程中的电弧、有害身体的工作 姿势、噪声、高温等)。
--危险又可以意外发生(如爆炸、意外启动引起的挤压、泄漏引起的喷射、加减速引起的坠落等)。
[GB/T 5226.1—2019,定义 3.1.33]
3.4
电柜 electric cabinet
用以置放安装工业机器人电气设备及系统电路和部件的壳体。
3.5
操作机 manipulator
用来抓取和(或)移动物体,由一些相互较接或相对滑动的构件组成的多自由度机器。
注1:操作机可由操作员、可编程控制器,或某些逻辑系统(如凸轮装置、线路)来控制。
注2:操作机不包括末端执行器。
[GB/T 12643—2013,定义 2.1]
3.6
工业机器人industrial robot
自动控制的、可重复编程、多用途的操作机(固定式或移动式),可对三个或三个以上轴进行编程。
注1:工业机器人包括:
——操作机,含制动器;
--控制器,含示教盒和某些通信接口(硬件和软件)。
注2:包括某些集成的附加轴。
注3:某些特定工业机器人的控制轴数为二轴-
注 4:改写 GB/T 12643—2013,定义 2.9。
3
犌犅/犜5226.7—2020
3 .7
工业机器人系统industrial robot system
由(多)机器人、(多)末端执行器和为使机器人完成其任务所需的任何机械、设备、装置、外部辅助轴 或传感器构成的系统。
[GB/T 12643—2013,定义 2.15]
3 .8
工业机器人单元industrial robot cell
相关机器、设备及相关的安全防护空间和保护装置的一个或多个机器人系统。
注:改写 GB/T 12643—2013,定义 2.23。
3 .9
基本防护 basic protection
在非故障条件下的电击防护。
注:以前称为“直接接触的防护”。
[GB/T 5226.1—2019,定义 3. 1.4]
3 .10
故障防护 fault protecton
带电部分与外露可导电部分之间因绝缘失效(或产生故障)的电击防护。
注:以前称为“间接接触的防护”。
3 .11
安全防护装置safeguard
为保护人们避免危险而提供的防护装置或保护器件。
[GB/T 5226.1—2019,定义 3.1.55]
3 .12
等电位联结 equipotential bonding
为了达到等电位,保证多个可导电部分间的电连接。
[GB/T 5226.1—2019,定义 3.1.26]
3 .13
保护联结 PrOteCHVe bonding
为防止因绝缘失效发生电击而连接在一起的保护导线(体)和导体件。
注1:防止电击的措施也能减少灼伤或火灾的风险。
注2:保护联接也可以由保护导线(体)和保护联接导线(体)通过电气设备和机器的导电部分进行传导连接而实现。 [GB/T 5226.1—2019,定义 3.1.49]
3 .14
功能联结 functional bonding
电气设备正常运行所需要的等电位联结。
[GB/T 5226.1—2019,定义 3.1.32]
3 .15
安全功能 safety functon
其失效会立即造成风险增加的机器功能。
[GB/T 5226.1—2019,定义 3.1.57]
4
犌犅/犜5226.7—2020
4 一般要求
4.1基本原则
4.1.1通则
本部分适用于各种工业机器人的电气设备/系统及设备/系统部件。
作为机械设备风险评价的整体技术要求的一部分,与电气设备/系统危害有关的危险应进行危险分 析、危险识别与评价,将确定的风险充分降低,以及对可能遭受危害的人员及财产采取必要的保护措施, 并要求工业机器人及其电气设备的性能保持在合理的水平。
危险情况起因有下列几种,但不限于这些:
—— 电气设备失效或故障,从而导致电击或电火的发生;
——控制电路(或者与其有关的元器件)失效或故障,从而导致机械误动作;
—— 电源的骚扰或中断,以及动力电路失效或故障造成的机械误动作;
—— 由于滑动或滚动接触的电路连续性损失,所引起的安全功能失效;
—— 由电气设备外部或内部产生的电骚扰(如电磁、静电),从而导致机械误动作;
—— 由存储的能量(电气或机械的)释放,从而导致例如电击、会引起伤害的非预期动作;
——噪声达到危害人员健康的程度;
——会引起伤害的外表温度。
对在危险识别中确定的危险进行风险评估,尤其是对下述情况要特别关注:
——包括示教、设置、维护及清扫等在内的例行操作;
..意外启动;
——合理预见的工业机器人误操作;
——控制系统故障的影响;
——与特定工业机器人应用有关的危险。
安全措施包括设计阶段和要求用户配置的综合设施。
在设计和研制过程中,应首先识别源于工业机器人及电气设备的危险和风险。若本质安全设计方 法不能消除危险和/或充分降低风险的场合,应提供降低风险的保护措施(例如:安全防护)。在需要进 一步降低风险的场合和/或遗留危险,应采用其他措施提供额外的方法(如采用信息来标记和警告操作 者,培训操作者安全使用)。此外,降低风险的工作程序是需要的。
4.1.2电气设备/系统的基本安全
4.1.2.1急停安全
电气设备/系统中每一个能独立启动工业机器人运行的电气控制站(控制台/控制面板)上,均应设 置有手动的急停装置,其具体要求见GB 11291.1—2011中的5.5.2。
4.1.2.2保护性停止安全
电气设备/系统应具有一个或多个的保护性停止电路的安全设置。其具体要求见GB11291.1— 2011 中的 5.5.3。
4.1.2.3限位安全
电气设备/系统应具有下列限位安全措施:
a)在未采用多圈绝对编码器作为位置传感器的情况下,每个单轴(关节或直线轴)设置机电正负
5
犌犅/犜5226.7—2020
限位挡块(装置),其具体要求见GB 11291.1—2011中的5.12.2;
b)由软件确定的轴及空间的安全软限位,作为一种确定和减小所提供的限定空间的手段,其具体 要求见 GB 11291.1—2011 中的 5.12.3;
C)必要时,设置在工业机器人系统周期内机器人的限定空间中自动受控变更动态限位装置,该装 置能在额定负载下停止工业机器人运动,其具体要求见GB 11291.1—2011中的5.12.4。
4.1.2.4降速控制/限速运行安全
电气设备/系统应具有把工业机器人速度限制在≤250 mm/s、使得人员来得及从工业机器人危险 运动中脱身或停止工业机器人运动的安全措施,其具体要求见GB 11291.1—2011中的5.6。
4.1.2.5操作方式安全
电气设备/系统应具有不同操作方式(如自动方式、手动降速方式及手动高速方式)选择的安全措 施,其具体要求见GB 11291.1—2011中的5.7。
4.1.2.6示教控制安全
电气设备/系统应具有示教盒(或其他控制装置)控制的安全措施,其具体要求见GB 11291.1 — 2011 中的 5.8。
注:无示教盒不作要求。
4.1.2.7原点设置及故障诊断安全
电气设备/系统应具有在原点位置校准前、禁止机器人除手动运行外的其他运动,以防止危险产生 的安全措施。同时还应具有通过各种措施(包括信息等)对工业机器人进行故障诊断并进行相应维护的 安全措施。
4.1.2.8同时运动控制及协同操作安全
当需要时,电气设备/系统应具有多工业机器人同时控制的安全措施,其具体要求见GB 11291.1— 2011 中的 5.9。
在有协同操作时,电气设备/系统应具有协同操作的安全措施,其具体要求见GB 11291.1—2011中 的 5.10。
4.1.2.9奇异性保护安全
当需要时,电气设备/系统应具有奇异性保护的安全措施,其具体要求见GB 11291.1—2011中的 5.11。
4.1.2.10碰撞检测与处理安全
当需要时,电气设备/系统应具有碰撞检测和处理安全措施,即当工具或工业机器人本体与周边设 备发生碰撞时,不通过任何外部传感器,在瞬间检测并能使工业机器人停止,使碰撞造成的损害降低。 在示教模式及再现模式下检测出碰撞时,工业机器人均应能紧急停止。
4.1.2.11断电后关节自锁安全
对因关节自重及不同姿态下工具自重有可能导致断电后关节跌落的状况,电气设备/系统应具有内 置刹车或外部刹车措施,确保工业机器人在断电、去使能、急停等状态下,关节能够自锁,并保持当时的 位置与姿态。
6
犌犅/犜5226.7—2020
4.1.2.12非自锁关节的延时去使能安全
对于工业机器人某些不具备自锁功能的关节,在速度非零的情况下非正常停机瞬间,如果关节不能 保持当时的位置与姿态,电气设备/系统应具有去使能的安全措施,确保速度为零之后再去使能。
4.1.2.13操作权限及控制软件安全
电气设备/系统应具有对不同用户进行功能使用、参数设置和密码设置等权限限制的安全措施。
安全确保措施中的基本条件是重要部位不允许软件介入。例如,主电源开关不允许通过软件来接 通。紧急停止电路的任务是切断动力源,是处理故障的最后手段。因此,紧急停止电路应直接与动力源 用接线相连接,以保证发生故障时能够可靠地切断动力源。
如采用总线控制,在总线连接断开或总线发生故障时应保障连在总线上的I/O恢复到安全电平状 态,或考虑使用冗余系统。
4.2电气设备的选择
电气设备/系统和器件应:
--适应于它们预期的用途;
——符合有关标准的规定;
——按供方说明书要求使用。
4.3电源
4.3.1电气设备/系统应设计成能按4.3.2规定的电源条件下正常运行。
4.3.2电压:交流电源稳态电压值为(0.85〜Ll)倍标称电压。
频率:0.99〜l.0l倍标称频率(连续的)。
0.98〜1.02倍标称频率(短时工作)。
谐波:2次〜5次畸变谐波总和不超过线电压方均根值的10% ;对于6次〜30次畸变谐波的总和 允许最多附加线电压方均根值的2%。
不平衡电压:三相电源电压负序和零序成分都不应超过正序成分的2%。
电压中断:在电源周期的任意时间,电源中断或零电压持续时间不超过3 ms,相继中断间隔时间应 大于1 s。
电压降:电压降不应超过大于1周期的电源峰值电压的20%,相继降落间隔时间应大于1 s。
4.4 实际环境和运行条件
4.4.1概述
电气设备/系统应适应于其预期使用的环境和运行条件。
4.4.2电磁兼容性(EMC)
电气设备/系统产生的电磁骚扰不应超过其预期使用场合允许的水平,同时对电磁骚扰应有足够的 抗扰度水平,以保证电气设备/系统在预期使用环境中可以正常运行。
电气设备/系统要求进行抗扰度和/或发射试验(见附录A),但下列条件除外:
7
犌犅/犜5226.7—2020
——采用的装置或元件已符合相关产品标准或通用标准(无产品标准时)的EMC要求;
—— 电气安装和布线已符合装置和元件供方的要求(电缆、屏蔽、接地等)或已采取降低电磁影响的 有效措施(见GB/T 5226.1—2019中的附录H)。
注:工业机械的EMC的通用标准分别见GB 23313—2009(发射限值)和GB/T 21067—2007(抗扰度限值)。
4.4.3环境空气温度
电气设备/系统应能在预期环境空气温度中正常工作,其要求是当外壳(柜、箱或盒)的外部环境空 气温度为5 ℃〜40℃范围内能正常工作。
制造商可根据具体电气设备/系统的使用环境规定使用的最低或最高环境空气温度。
4.4.4湿度
当最高温度为40℃,相对湿度不超过50%时,电气设备/系统应能正常工作。温度低则允许高的 相对湿度,如20 ℃时相对湿度为90%。
要求采取正确的电气设备/系统设计来防止偶然性凝露的有害影响,必要时采用适当的附加设施 (如内装加热器、空调器、排水孔等)。
4.4.5海拔
电气设备/系统应能在海拔2 000 m以下正常工作。
对于要在高海拔地区使用的电气设备/系统,有必要降低下列因素:
--介电强度;
——装置的开关能力;
——空气的冷却效应。
关于要使用而在产品数据中又没有规定的修正因数,宜向制造商咨询。
4.4.6污染
电气设备/系统的污染防护应符合GB/T 5226.1—2019中的4.4.6的规定。
4.4.7离子和非离子辐射
当电气设备/系统受到辐射时(如微波、紫外线、激光、X射线),应采取附加措施,以避免误动作和加 速绝缘的老化。
4.4.8振动、冲击和碰撞
应通过选择合适的设备,将它们远离振源安装或采取附加措施,以防止(由机械设备及其有关设备 产生或实际环境引起的)振动、冲击和碰撞的不良影响。
4.5运输和存放
电气设备/系统应通过设计或采取适当的预防措施,以保障能经受在一25 ℃〜55 ℃的温度范围内 运输和存放,并能经受温度高达70 ℃、时间不超过24 h的短期运输和存放。应采取防潮、防振和抗冲 击措施,避免损坏电气设备。
注:在低温下易损坏的电气设备包括PVC绝缘电缆。
5引入电源线端接法和切断开关
5.1引入电源线端接法
宜把电气设备/系统连接到单一电源上。如果需要用其他电源供电给电气设备/系统的某些部分
8
犌犅/犜5226.7—2020
(如不同工作电压的电子设备),这些电源宜尽可能取自组成为机械电气设备一部分的器件(如变压器、 换能器等)。
除非电气设备采用插头/插座直接连接电源处,否则电源线应直接连到电源切断开关的电源端 子上。
如果需要使用其他电压或电源系统来满足电气设备/系统的某些部分(如电子设备、电磁离合器等) 的供电要求,这些电源宜尽可能通过电气设备/系统组成部分的器件(如变压器、整流器、换能器等) 供电。
除非电气设备/系统采用插头/插座直接连接电源处,否则电源线应直接连到电源切断开关的电源 端子上。
使用中线时应在电气设备的技术文件(如安装图和电路图)上表示清楚,标记符号N,并应为中线提 供单用绝缘端子。
在电气设备/系统内部,中线(N)和保护联结电路(PE)之间不应相连。
引入电源连接端子都应按GB/T 4026-2019的规定进行清晰的标识。
5.2连接外部保护接地导体的端子
电气设备/系统应根据配电系统连接外部保护接地导体或连接外部保护导线体,该连接的端子应设 置在各引入电源有关相线端子的邻近处。
这种端子的尺寸应适合与表1规定截面积的外部铜保护导线相连接。
表1外部保护铜导线的最小截面积
|
设备供电相线的截面积S/mm2 |
外部保护导线的最小截面积/mm2 |
|
犛≤16 |
犛 |
|
16<犛≤35 |
16 |
|
犛>35 |
犛/2 |
如果外部导线不是铜的,则端子尺寸应适当选择。
每个引入电源点,连接外部保护接地导体或外部保护导线体的端子应加标志或用字母标志PE来 标记(见 GlyT 4026—2019)。
5.3电源切断(隔离)开关
5.3.1概述
电气设备/系统的每个引入电源应装电源切断开关;
当配备两个或两个以上的电源切断开关时,为了防止出现危险情况,应采取联锁保护措施。
5.3.2型式
电源切断开关应是下列型式之一:
a)符合GB/T 14048.3—2017的隔离开关,使用类别ΛC-23B或DC-23B;
b)符合GB/T 14048.3—2017的隔离器,带辅助触点的隔离器,在任何情况下辅助触点都使开关 器件在主触点断开之前先切断负载电路;
C)绝缘符合GB/T 14048.2—2008的断路器;
d)任何符合产品标准和满足GB/T 14048.1—2012规定的隔离要求,又在产品标准中定义适合 作为驱动器(驱动单元)负荷开关或其他感应负荷应用类别的开关电器;
9
犌犅/犜5226.7—2020
e)通过软电缆供电的插头/插座组合。
5.3.3要求
当电源切断开关采用5.3.2a)〜d)规定的型式之一时,应满足下述全部要求:
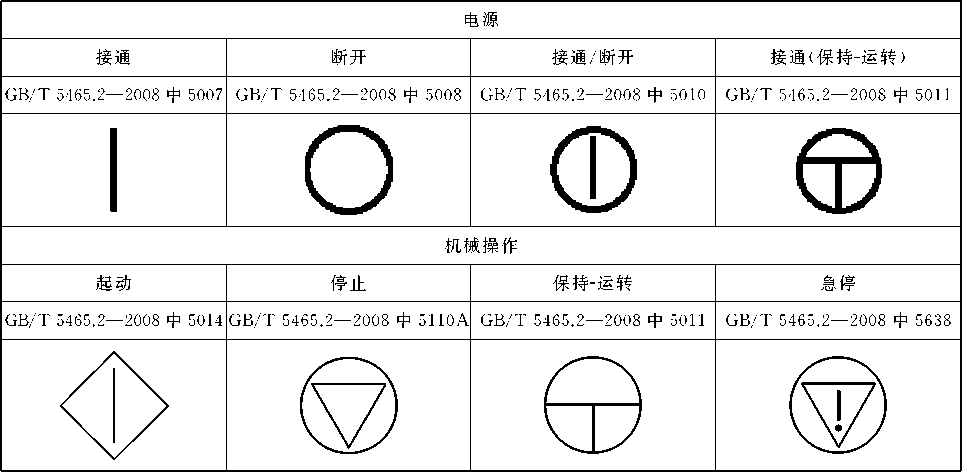
a)把电气设备/系统从电源上隔离,仅有一个“断开”和“接通”位置,清晰地标记“。”和“|" (GB/T 5465.2—2008 中 5008 和 GB/T 5465.2-2008 中 5007 符号)。
b)有可见的触头间隙或位置指示器并已满足隔离功能的要求,指示器在所有触头没有确实断开 前不能指示断开(隔离)。
C)有一个外部操作装置(如手柄),(例外:动力操作的开关设备有其他办法断开的场合,这种操作 不必一定要从电柜外部进行)。在外部操作装置不再供紧急操作使用场合时,外部操作装置的 颜色建议使用黑色或灰色。
电源切断开关为插头/插座组合的场合,插头/插座应符合GB/T 11918.1—2014的规定。
5.3.4操作装置
电源切断开关的操作装置(例如:手柄)应容易接近,应安装在维修站台以上0.6 m〜1.9 m间。上 限值宜为1.7 m。
GB/T 18209.3—2010给出了操作方向的要求。
5.4防止意外起动的断开器件
应配备防止意外起动的断开器件(如维修期间机器人或机械部件的起动可能发生危险)。
5.5断开电气设备的器件
当电气设备/系统要求断开和隔离时,应配备电气设备的断开(隔离)器件使其工作。这样的断开器 件应满足以下条件:
——对预期使用适当而方便;
--安排合适;
——对电气设备/系统的电路或部件进行维修时可以快速识别。
应提供措施以防止断开器件来自控制器和(或)其他位置因疏忽或错误的闭合。
5.6对未经允许、疏忽和错误连接的防护
装在封闭电气工作区外的防止意外起动的断开器件和断开电气设备的器件在其断开位置(或断开 状态)应提供安全措施(例如:提供挂锁、陷阱钥匙联锁)。
6 电击防护
6.1概述
电气设备/系统应具备在下列情况下保护人们免受电击的能力:
基本防护(见6.2和6.4);
...故障防护(见6.3和6.4)。
宜采用6.2、6.3和6.4中保持特低电压(PELV)规定的防护措施,这些规定源于GB/T 16895.21— 2011。这些防护措施不适用的场合,例如:由于实际或运行条件,可以采用GB/T 16895.21—2011的其 他措施。
10
犌犅/犜5226.7—2020
6.2基本防护
6.2.1概述
电气设备/系统的每个电路或部件,无论是否采用6.2.2或6.2.3规定的措施,都应采用6.2.,1规定 的措施。
例外:在这些防护措施不适用的场合,可以采用GB/T 16895.21—2011所规定的其他直接接触的 防护措施(如使用遮栏或外护物,使用结构或安装防护通道技术,见6.2.5和6.2.6)。
当电气设备/系统安装在任何人都能打开的地方,采用6.2.3或6.2.2中的防护措施,其直接接触的 防护等级应采用至少IP4X或IPXXD(见GB/T 4208—2017),或采用6.2.3中的防护措施。
6.2.2用外壳作防护
带电部分应安装在外壳内,接触带电部分的最低防护等级为IP2X或IPXXB(见GB/T 42082017)。
如果壳体上部表面是容易接近的,其接触带电部分的最低防护等级应为IP4X或IPXXD。
满足下列条件之一时才允许开启外壳(门、罩、盖板等):
a)使用钥匙或工具开启外壳。
注:钥匙或工具的使用是为限制熟练或受过训练的人员进人[见17.2f),
b)开启外壳之前应先切断其内部的带电部件。
注:这可由门与切断开关(如电源切断开关)的联锁机构来实现,使得只有在切断开关断开后才能打开门,以及把门 关闭后才能接通开关。
例外:下列情况可用供方规定的钥匙或工具解除联锁:
—— 当解除联锁时,不论什么时候都能断开切断开关并在断开位置锁住切断开关或其他防止未经允许闭合切 断开关;
—— 当关上门时,联锁功能自动恢复;
—— 当设备需要带电对电器重新调整或整定时,可能触及的所有带电部件(包括门内的部件),其防止意外接触 带电部分的防护等级至少为IP2X或IPXXB.以及门内其他带电部件防止意外接触的防护等级至少为 IP1X 或 IPXXA;
——有关解除联锁程序的相关信息随电气设备/系统使用说明书提供(见第17章);
——电柜背后门未与断开机构直接联锁时,应提供措施限制熟练或受过训练的人员[见17.2b):!接近带电体。 切断开关断开后所有仍然带电的部件(见5.3.5)应防护,其直接接触的防护等级应至少为IP2X或IPXXB(见 GB/T 4208—2017)。以下情况除外:
——仅由于连接联锁电路而可能带电的部件和用颜色区分可能带电的部件应符合13.2.4规定;
——若电源切断开关单独安装在独立的外壳中,它的电源端子可以不遮盖。
C)只有当所有带电件直接接触的防护等级至少为IP2X或IPXXB时(见GB/T 4208—2017),才 允许不用钥匙或工具和不切断带电部件去开启外壳。用遮栏提供这种防护条件时,要求使用 工具才能拆除遮栏,或拆除遮栏时所有被防护的带电部分能自动断电。在防止接触保护达到 6.2.2c)要求,以及手动操动器件(例如:手动闭合接触器或继电器)可能导致危险的场合,这种 操动方式应提供需要工具才能除去遮栏或阻挡物的防护措施。
6.2.3用绝缘物防护带电体
带电体应用绝缘物完全覆盖住,只有用破坏性办法才能去掉绝缘层。在正常工作条件下绝缘物应 能经得住机械的、化学的、电气的和热的应力作用。
注:油漆、清漆、喷漆和类似产品,不适于单独用作防护正常工作条件下的电击。
11
犌犅/犜5226.7—2020
6.2.4残余电压的防护
电源切断后,任何残余电压高于60 V的带电部分,都应在5 S之内放电到60 V或60 V以下,只要 这种放电速率不妨碍电气设备的正常功能(元件存储电荷小于或等于60 μC时可免除此要求)。如果这 种放电速率会干扰设备的正常功能,则应在容易看见的位置或在包含带电部分的外壳邻近处,作耐久性 警告标志提醒注意危险,并注明打开外壳前所需的延时时间。
对插头/插座或类似的器件,拔出它们会裸露出导体件(如插针),放电至60 V的时间不应超过1 s, 否则这些导体件应加以防护,防护等级至少为IP2X或IPXXBo如果放电时间不小于1 s,最低防护等 级又未达到IP2X或IPXXB,应采用附加开关电器或适当的警告措施,提请注意危险的警告标志,并注 明所需的延时时间。当设备位于所有人都能接触的地方,警告是不够的,避免接触带电部分的最低防护 等级为IP4X或IPXXD。
注:变频器和DC母线电源的放电时间可能超过5 s。
6.2.5用遮栏的防护
用遮栏的防护应符合GB/T 16895.21—2011的规定。
6.3故障防护
6.3.1概述
故障防护用来预防带电部分与外露可导电部分之间因绝缘失效时所产生的危险情况。
对电气设备/系统的每个电路或部件,至少应采用6.3.2和6.3.3规定的措施之一:
-- 防止出现危险触摸电压(6.3.2);或
——触及触摸电压可能造成危险之前自动切断电源(6.3.3)。
注1:由触摸电压引起有害的生理效应的风险取决于触摸电压及可能暴露的持续时间。
注2:设备和保护措施的分类参见GB/T 17045—2008。
6.3.2出现触摸电压的预防
6.3.2.1 概述
防止出现危险触摸电压有下列措施:
——采用U类设备或等效绝缘;
..电气 隔离。
6.3.2.2采用H类设备或等效绝缘作防护
这种措施用来预防由于基本绝缘失效而出现在易接近部件上的触摸电压。
这种保护应用下述一种或多种措施来实现:
——采用H类电气设备或器件(双重绝缘、加强绝缘或符合GB/T 17045-2008的等效绝缘);
——按GB/T 7251.1—2013采用具有完整绝缘的成套开关设备和控制设备;
——按GB/T 16895.21—2011使用附加的或加强的绝缘。
6.3.2.3采用电气隔离作防护
单一电路的电气隔离,用来防止该电路的带电部分基本绝缘失效时的触摸电压。
这种防护型式应符合GB/T 16895.21—2011的规定。
12
犌犅/犜5226.7—2020
6.3.3用自动切断电源作防护
受绝缘故障影响的任何电路的电源自动切断是为了防止由触摸电压引起的危险情况。
在故障情况下这种措施,是经保护器件自动操作切断一路或多路相线。切断应在极短时间内出现, 以限制触摸电压使其在持续时间内没有危险。
6.4采用PELV的保护
6.4.1基本要求
采用PELV保护人身免于间接接触和有限区间直接接触的电击防护。
PELV电路满足条件如下:
a)标称电压不应超过:
1)当设备在干燥环境正常使用,带电部分与人体无大面积接触时,不超过25 V AC均方根 值或60 V DC无纹波;
2)其他情况,6 V AC均方根值或15 VDC无纹波。
注:无纹波一般定义为正弦波的纹波电压其纹波含量不超过10%均方根值。
b)电路的一端或该电路电源的一点应连接到保护联结电路上。
C) PELV电路的带电体应与其他带电回路电气隔离。电气隔离不应低于安全隔离变压器初级和 次级电路之间的要求(见 GB/T 19212.1—2016 和 GB/T 19212.7—2012)。
d)每个PELV电路的导线应与其他电路导线相隔离。
C) PELV电路用插头/插座应遵守下列规定:
1)插头不能插入其他电压系统的插座;
2)插座不接受其他电压系统的插头。
6.4.2 PELV 电源
PELV电源应为下列的一种:
——符合GB/T 19212.1—2016和GB/T 19212.7—2012要求的安全隔离变压器;
——安全等级等效于安全隔离变压器的电流源(如等效绝缘绕组的发电机);
——符合适用标准的电子电源,该标准规定要采取措施保证即使出现内部故障,输出端子的电压也 不超过6.4.1的规定值。
7电气设备的保护
电气设备/系统的保护措施主要包括:由短路引起的过电流保护、电动机过热保护(过载保护、过流 保护、超温保护、限流保护)、异常温度保护(防护)、对电源中断或电压降落随后复原的保护、电动机的超 速保护、附加接地故障/残余电流保护、相序保护、闪电和开关浪涌引起的过电压保护以及短路电流定额 的确定。
以上所述电气设备/系统的保护应符合GB/T 5226.1—2019中第7章的规定。
8等电位联结
等电位联结分为保护联结(保护接地)和功能联结(功能接地)。
保护联结是为保护人员防止电击及故障防护的基本措施。
13
犌犅/犜5226.7—2020
功能联结是为降低:绝缘失效影响工业机器人运行的后果、敏感电气设备受电骚扰而影响运行的后 果及可能会损坏电气设备的闪电感应电流。通常的功能联结可由连接到保护联结电路来实现。对于电 气设备/系统的适当功能,而对保护联结电路的骚扰水平不是足够低的场合,应使用单独的导线(体)分 别用于保护联结和功能联结。
上述的等电位联结应符合GB/T 5226.1—2019中第8章的规定。
此外,还应将机器人的机械本体、控制柜连接到保护联结电路,以保证保护联结电路的连续性。
9控制电路和控制功能
9.1控制电路
9.1.1控制电路电源
控制电路由交流电源供电时应使用变压器供电。这些变压器应有独立的绕组。如果使用几个变压 器,宜使这些变压器的绕组按使二次侧电压同相位的方式连接。
如果取自交流电源的直流控制电路连接到保护联结电路,它们应由交流控制电路变压器的独立绕 组或由另外的控制电路变压器供电。
9.1.2控制电路电压
控制电压标称值应与控制电路的正确运行协调一致。
AC控制电路的标称电压不宜超过:
--230 V,适用于标称频率50 HZ的电路;
——277 V,适用于标称频率60 Hz的电路。
DC控制电路的标称电压不宜超过220 V。
控制电路的电压应是下列一种或多种:
———6V/24V/48V/100V/110V/120V/200V/220V/230V(AC);
———5V/6V/12V/24V/48V/110V/220V(DC)。
9.1.3保护
控制电路应提供过电流保护。
9.2控制功能
9.2.1概述
控制功能包括停止功能类别、操作(安全功能和/或保护措施、起动、停止、紧急操作、无线控制系统 等)。
通过网络通信进行控制操作时,应具有可靠的通信传输特性对其数据进行校验,以保证数据可靠准 确,同时具有与工业机器人控制操作的安全联锁机制。电气设备/系统与外部网络有通信连接时,其网 络通信协议中应包含有数据安全、病毒防护相对应保护、防攻击措施。
通过与外部传感结合控制,如视觉、听觉、力觉等,应具有安全保护措施,防止异常运行造成对人员 或设备的损伤。
9.2.2停止功能类别
有下列三种类别的停止功能:
0类:用即刻切除机械致动机构动力的办法停车。
14
犌犅/犜5226.7—2020
1类:给机械致动机构施加动力去完成停车并在停车后切除动力的可控停止。
2类:利用储留动能施加于机械致动机构的可控停止。
9.2.3操作
9.2.3.1 概述
当要求降低危险情况出现的可能性时,应提供安全功能和/或保护措施(例如联锁)。
当一台机械有多个控制站时,应提供措施以确保来自不同控制站的起动命令不会导致危险情况 发生。
9.2.3.2 起动
起动功能应通过激励相关电路来操作。
运转的起动应只有在安全功能和/或防护装置全部到位并起作用后才能进行,但9.3.6叙述的情况 除外。
有些机械(如活动机械)上的安全功能和/或保护措施不适合某些操作,这类操作的起动应采用保持 运行控制,必要时,与使能装置一起使用。
在起动有危险的机械运行前,应考虑听觉和/或视觉报警信号的规定。
应提供适当的联锁以确保正确的起动顺序。
在机械要求使用多个控制站操作起动时,每个控制站应配备一个独立的手动操作的起动控制装置。
操作起动条件如下:
——应满足机械运行所需的全部条件;
——所有起动控制装置应处于释放(断开)位置,然后;
——所有起动控制装置应联合引发。
9.2.3.3 停止
根据机械的风险评价及机械的功能要求,应提供O类、1类或2类停止。
注1:当电源切断装置(见5.3)操作时属于O类停止。
停止功能应否定有关的起动功能。
控制站为一个以上时,根据机械风险评价的要求,来自任何控制站的停止指令均应有效。
注2:当引发停止功能时,除停止运动外,必要时还需终止机械功能。
9.2.3.4紧急停止(急停)、紧急断开
紧急停止(急停)及紧急断开的要求及操作应符合GB/T 5226.1—2019中9.2.3.4的规定。
9.3联锁保护
联锁保护包括联锁安全防护装置的复位、超过行程限值、辅助功能的工作、不同工作和相反运动间 的联锁、反接制动、安全功能和/或安全防护措施、暂停。
联锁保护应符合GB/T 5226.1—2019中9.3的规定。
9.4失效情况的控制功能
失效情况的控制功能包括一般要求、失效情况下减低风险的措施、控制电路故障的防护,均应符合 GB/T 5226.1—2019 中 9.4 的规定。
15
犌犅/犜5226.7—2020
9.5电气设备/系统的功能安全
功能安全是工业机器人整体安全的一部分,取决于电气设备/系统响应其输入的正确运行。
在GB/T 16855.1—2018中,安全有关部件执行安全功能的能力是通过性能等级(PL)来表示的。
而在GB 28526-2012和GB/T 20438.1—2017中,安全控制系统执行安全功能的能力是通过安全 完整性等级(SlL)体现的。表2给出了性能等级PL和安全完整性等级SIL之间的关系。
如果确定所需的性能等级(PL),可参见GB/T 16855.1—2018的附录A。
GB 28526-2012的附录A给出计算SIL的方法示例。
实现功能安全的进一步信息在 GB/T 16855.1—2018、GB 28526—2012、GB/T 20438.1—2017、 GB/T 15969.6—2015 中给出。
表2 SIL和PL
|
安全完整性等级SIL (按 GB/T 204 38.1—2017 或 GB 28526—2012 提供信息) 连续操作模式 |
每小时危险失效概率犘 |
性能等级PL |
|
— |
10-5≤犘<10-4 |
a |
|
SIL1 |
10-6≤犘<10-5 |
b |
|
SIL2 |
10-7≤犘<10-6 |
c |
|
SIL3 |
10-8≤犘<10-7 |
d |
|
SIL4 |
10-9≤犘<10-8 |
e |
10操作板与控制器件
10.1通则
10.1.1 一般器件要求
操作板的控制器件应按GB/T 18209.1—2010及GB/T 18209.2—2010的规定尽可能合适选择、安 装和标识或编码。
应使疏忽操作的可能性降到最低,例如器件的定位,合适的设计,提供附加保护措施。应特别考虑 用于危险机械控制的操作者输入装置(例如触摸屏、键盘和键区)以及用于启动机械操作的传感器(例如 位置传感器)的选择、排列、编程和使用。
操作板器件的位置应考虑人类工效学原则。
10.1.2位置和安装
为了适用,安装在机械上的控制器件应:
——维修时易于接近;
——安装得使由于物料搬运活动引起损坏的可能性减至最小。
手动控制器件的操动器应这样选择和安装:
——操动器不低于维修站台以上0.6 m,并处于操作者在正常工作位置上易够得着的范围内;
——使操作者进行操作时不会处于危险位置;
——意外操作的可能性减至最小。
16
犌犅/犜5226.7—2020
10.1.3防护
防护等级(见GB/T 4208—2017)和其他适当措施一起应防止:
——实际环境中和使用机械上发生的侵蚀性液体、油、雾或气体的作用;
——杂质(如铁屑、粉尘、物质粒子)的侵入。
此外,操作板上的控制器件直接接触的防护等级至少应采用IPXXD(见GB/T 4208-2017)。
10.1.4位置传感器
位置传感器(如位置开关、接近开关)的安装应确保即使超程它们也不会受到损坏。
电路中使用的具有相关安全功能(例如,保持机械的安全状态或防止机械产生危险情况)的位置传 感器,应具有直接断开操作(见GB/T 14048.5—2017)或提供类似可靠性措施。
10.1.5便携式和悬挂控制站
便携式及悬挂操作控制站(如示教盒)及其控制器件的选择和安装应使得由冲击和振动(例如操作 控制站下落或受障碍物碰撞)引起机械的意外运转可能性减到最小。
10.2操动器
10.2.1颜色
操动器的颜色代码应按以下要求:
——起动/接通操动器的颜色应为白、灰、黑或绿色,优选白色,不允许用红色。
——急停和紧急断开操动器(包括电源切断开关,它预期用于紧急情况)应使用红色。最接近操动 器周围的衬托色则应着黄色。红色操动器与黄色衬托色的组合应只用于紧急操作装置。
——停止/断开操动器应使用黑、灰或白色,优先用黑色。不允许用绿色。允许选用红色,但靠近紧 急操作器件不宜使用红色。
——作为起动/接通与停止/断开交替操作的操动器的优选颜色为白、灰或黑色,不允许用红、黄或 绿色。
——对于按动它们即引起运转而松开它们则停止运转(如保持-运转)的操动器,其优选颜色为白、 灰或黑色,不允许用红、黄或绿色。
——复位按钮应为蓝、白、灰或黑色。如果它们还用作停止/断开按钮,最好使用白、灰或黑色,优先 选用黑色,但不允许用绿色。
——黄色供异常条件使用,例如,在异常加工情况或自动循环中断事件中。
——对于不同功能使用相同颜色白、灰或黑(如起动/接通和停止/断开操动器都用白色)的场合,应 使用辅助编码方法(如形状、位置、符号)以识别按钮操动器。
10.2.2标记
按钮宜使用表3给出的符号标记,标记可标在其附近,最好直接标在操动器之上。
17
犌犅/犜5226.7—2020
表3操动器符号
10.3指示灯和显示器
10.3.1概述
指示灯和显示器用来发出下列型式的信息:
——指示:引起操作者注意或指示操作者应该完成某种任务。红、黄、蓝和绿色通常用于这种方式。 闪烁指示灯和显示器见10.3.3。
——确认:用于确认一种指令、一种状态或情况,或者用于确认一种变化或转换阶段的结束。蓝色 和白色通常用于这种方式,某些情况下也可以用绿色。
指示灯和显示器的选择及安装方式,应从操作者的正常位置看得到(见GB/T 18209.1—2010)。 用于警告人员紧急危险的听觉或视觉设备的电路,应配备检查这些设备可操作性的装置。
10.3.2颜色
指示灯玻璃的颜色代码应根据机械的状态符合表4的要求。
表4指示灯的颜色及其相对于机械状态的含义
|
颜色 |
含义 |
说明 |
操作者的动作 |
|
红 |
紧急 |
危险情况 |
立即动作去处理危险情况 (如断开机械电源,发出危险状态报警并保持 机械的清除状态) |
|
黄 |
异常 |
异常情况 紧急临界情况 |
监视和(或)干预(如重建需要的功能) |
|
绿 |
正常 |
正常情况 |
任选 |
|
蓝 |
强制性 |
指示操作者需要动作 |
强制性动作 |
|
白 |
无确定性质 |
其他情况,可用于红、黄、 绿、蓝色的应用有疑问时 |
监视 |
18
机械上指示塔台适用的颜色自顶向下依次为红、黄、蓝、绿和白色。
犌犅/犜5226.7—2020
10.3.3闪烁灯和显示器
为进一步区别或发出信息,尤其是给予附加的强调,闪烁灯和显示器可用于下列目的:
弓I起注意;
--要求立即动作;
——指示指令与实际情况有差异;
——指示进程中的变化(转换期间闪烁)。
对于较高优先级信息,宜使用较高闪烁频率。
用闪烁灯或显示器提供较高优先级信息的场合,也应提供声音报警。
10.4光标按钮
光标按钮操动器的颜色代码应符合10.2.1的要求。当难以选定适当的颜色时,应使用白色。
急停操动器激活的颜色应保持为红色,与照度无关。
10.5旋动控制器件
具有旋动部分的器件(如电位器和选择开关)的安装应防止其静止部分转动,只靠摩擦力是不够的。
10.6起动器件
用于引发起动功能或移动机械部件(如直线轴移动)的操动器,其设计和安装应尽量减小意外操作 的可能。
10.7急停器件
10.7.1急停器件位置
急停器件应易接近。
急停器件应设置在要求引发急停功能的各个位置。
急停器件可能出现有效和无效之间相混淆的情况,例如由拔出或其他使操作站失效引起。在这种 情况下,应提供最不易混淆的方法(如设计和使用信息)。
10.7.2急停器件型式
急停器件的型式包括:
——按钮装置的操动用手掌或拳触及(例如蘑菇头式);
——拉线操作开关;
——不带机械防护装置的脚踏开关。
急停器件应具有直接断开操作。
10.7.3急停操动器的颜色
急停器件的操动器应着红色。最接近操动器周围的衬托色则应着黄色。
10.7.4使能控制器件
使能控制是一个具有联锁功能的手动激励控制,有以下两种形式: a)被激励时,允许机械运行由独立的起动控制引发;和
19
犌犅/犜5226.7—2020
b)去除激励时:
1)引发停止功能;和
2)防止引发机械运行。
使能控制器件的选择和布置,应使其失效的可能性减至最小,例如在机械运转可能被重新起动前, 要求使能控制器件去除激励。
使能控制器件的选择应具有下列特性:
——设计要考虑人类工效学原则。
--对于二位置型式:
•位置1:开关的断开功能(操动器不起作用);
•位置2:使能功能(操动器起作用)。
——对于三位置型式:
•位置1:开关的断开功能(操动器不起作用);
•位置2:使能功能(中间位置操动器起作用);
•位置3:断开功能(超过中间位置操动器起作用);
•当从位置3返回位置2,使能功能不能起作用。
11控制设备的位置、安装和电柜
11.1通则
所有控制设备的位置和安装应易于:
接近和维护;
——防御外界影响和不限制机构的操作;
——机械及有关设备的操作和维护。
11.2位置和安装
11.2.1易接近性和维护
控制设备的所有元件的设置和排列应使得不用移动它们或其配线就能清楚识别。对于为了正确运 行而需要检验或需要易于更换的元件,应在不拆卸机械的其他设备或部件情况下就能得以进行(开门或 卸罩盖遮栏或阻挡物除外)。不是控制设备组件或器件部分的端子也应符合这些要求。
所有控制设备的安装都应易于从正面操作和维修。当需要用专用工具调整、维修或拆卸器件时,应 提供这些专用工具。为了常规维修或调整而需接近的有关器件,应安设于维修站台以上0.4 m〜2 m之 间。宜使端子至少在维修站台以上0.2 m,且使导线和电缆能容易连接其上。
除操作、指示、测量、冷却器件外,在门上或期望可拆卸的外壳孔盖上不应安装控制器件。
当控制器件是通过插接方式连接时,它们的插接应通过型号(形状)、标记或标志或参照代号(单个 或组合使用)清楚区分(见13.4.5)。
正常工作中需插拔的插头应具有非互换性,缺少这种特性会导致错误工作。
在正常工作过程中需要插拔的插头/插座连接器应定位安装,以便于提供畅通无阻的插拔。当提供 用于连接测试设备的测试点时应:
——在安装上提供畅通无阻的通道;
——有符合技术文件的清楚的标识(见17.3);
——有足够的绝缘;
——有充分的空间。
20
犌犅/犜5226.7—2020
11.2.2 实际隔离或成组
与电气设备无直接联系的非电气部件和器件不应安装在装有控制器件的外壳中。如电磁阀那样的 器件应与其他电气设备隔离开(如在单独隔间中)。
集聚安装并连有电源电压或连有电源与控制两种电压的控制器件,应与仅连有控制电压的控制器 件分隔开独立成组。
下列的接线端子应单独成组:
..动力电路;
——相关的控制电路;
—— 由外部电源馈电的控制电路(如联锁)。
但若能使各组容易识别(如通过标记、用不同尺寸、使用遮栏、用颜色),则各组可以邻近安装。
在布置器件位置时(包括互连),由供方为它们规定的电气间隙和爬电距离应考虑实际环境条件或 外部影响。
11.2.3热效应
电气设备外壳内部温升不应超过元件制造商规定的环境温度。
发热元件(如散热片、功率电阻)的安装应使附近所有元件的温度保持在允许限值的范围内。
11.3防护等级
控制设备应有足够的能力防止外界固体物和液体的侵入,并要考虑到工业机器人运行时的外界影 响(即位置和实际环境条件),且应充分防止粉尘、冷却液和切屑等。
控制设备的外壳的防护等级应不低于IP22 (见GB/T 4208-2017)。
电柜防护等级应为IP54或IP65(见GB/T 4208—2017)。
11.4电柜、门和通孔
制造电柜的材料能承受机械、电气和热应力以及正常工作中可能碰到的湿度和其他环境因素的 影响。
紧固门和盖的紧固件应为系留式的。
电柜窗的材料应适合承受预期机械应力和化学腐蚀。
电柜门宜使用垂直较链,开角最小95°,门宽不超过0.9 m。
门、罩、盖与外壳的结合面和密封垫,应能经受住机械所用的侵蚀性液体、油、雾或气体的化学影响。 为了运行或维修而需要打开或移动的电柜上的门、罩和盖,采取保持其防护等级的措施如下:
——它们应牢靠紧固在门、盖或外壳上;
——不应由于门、盖的移开或复位而损坏和使防护等级降低。
当外壳上有通孔(如电缆通道),包括通向地板或地基或机械其他部件的通孔,均应提供措施以确保 获得设备规定的防护等级。电缆的进口在现场应容易再打开。机械内部装有电器件的壁龛底面可提供 适当的通孔,以便能排除冷凝水。
如果电柜中有安装用孔,可能需要采取措施使安装后这些孔不削弱所要求的防护等级。
当需要时,应具有起吊环或叉车搬运作业的位置。
设备在正常或异常工作中,表面温度足以引起燃烧危险或对外壳材质有损害时:
——应将设备装入能承受这种温度的外壳中,而没有燃烧或损害的危险;
——设备的安装和位置应与邻近的设备有足够的距离以便安全散热(见11.2.3);
——用能耐受设备发热的材料屏蔽,避免燃烧或损害的危险。
21
犌犅/犜5226.7—2020
警告标志及标签应符合16.2.2的规定。
11.5电气设备通道
通道中的门和电气工作区用的通道门应:
——至少宽0.7 m,高2.1 m;
...向外开;
——允许从里开门,但有措施(如应急插销)而不使用钥匙或工具。
12导线和电缆
导线和电缆包括选择的一般要求、导线、绝缘、正常工作时的载流容量、导线和电缆的电压降、软电 缆及汇流线(汇流排/环),均应符合GB/T 5226.1—2019中第12章的有关规定。
13配线技术
13.1连接和布线
13.1.1 -般要求
所有连接,尤其是保护联结电路的连接应牢固,防止意外松脱。
连接方法应适合被端接导线的截面积和性质。
只有专门设计的端子,才允许一个端子连接两根或多根导线。但一个端子只应连接一根保护导线。
只有提供的端子适用于焊接工艺要求才允许焊接连接。
接线座的端子应清楚标示或用标签标明与电路图上相一致的标记。
当错误的电气连接(例如由更换元器件引起的)可能是危险源并且通过设计措施不可能降低时,导 线和/或端子应标识。
软导线管和电缆的敷设应使液体能排离该装置。
当器件或端子不具备端接多股芯线的条件时,应提供拢合绞心束的办法。不允许用焊锡来达到此 目的。
屏蔽导线的端接应防止绞合线磨损并应容易拆卸。
识别标牌应清晰、耐久,适合于实际环境。
接线座的安装和接线应使内部和外部配线不跨越端子。
13.1.2导线和电缆敷设
导线和电缆的敷设应使两端子之间无接头或拼结点,电缆端接应牢固可靠。使用带适合防护意外 断开的插头/插座组合进行连接,不认为是接头。
例外:如果在分线盒中不能提供(接线)端子(例如对活动机械,对有长软电缆的机械;电缆连接超 长,以至于电缆制造厂做不到在一个电缆盘上提供足够长的电缆),可以使用拼接或接头。为满足连接 和拆卸电缆和电缆束的需要,应提供足够的附加长度。
只要可能就应将保护导线靠近有关的负载导线安装,以便减小回路阻抗。
在铁磁电柜中安装的交流电路导线的安排应使得电路中所有导线包括保护导线装入同一外敷 物中。
进入铁电柜中的交流电路导线的安排应使得电路中所有导线包括保护导线只能共同由铁磁材料包 围,电路的导线之间为非铁磁材料,即电路的所有导线应经过同一电缆输入孔进入电柜。
22
GB/T 5226.7—2020
13.1.3不同电路的导线
不同电路的导线可以并排放置,可以穿在同一管道中(如导线管或电缆管道系统),也可以处于同一 多芯电缆中或处于同一个插头/插座组中,只要这种安排不削弱各自电路的正常功能,并且:
——如果这些电路的工作电压不同,应把它们用适当的遮栏彼此隔开;或者
——任何导线的绝缘均可以承受系统中的最高电压,如非接地系统线间电压和接地系统的相对地 电压。
13.1.4 AC电路-电磁影响(防止涡流)
在铁磁电柜中安装的Ae电路导线的安排应使各电路的所有导线包括各电路的保护导线装入同一 外敷物中。这类导线进入铁类电柜,它们的安排应使导线不被铁磁材料单独环绕。
AC电路不宜采用钢丝或钢带的铠装单芯电缆。
13.2导线的标识
13.2.1 一般要求
每根导线应按照技术文件的要求(见第17章)在每个端部做出标记。
导线标识(如为维修方便)宜用数字,字母数字,颜色(导线整体用单色或用单色、多色条纹)或颜色 和数字或字母数字的组合。采用数字时,应是阿拉伯数字,字母应是罗马字(大写或小写)。
13.2.2保护导线/保护联结导线的标识
应采用形状、位置、标记或颜色使保护导线/保护联结导线与其他导线易于区别。当只采用色标时, 应在导线全长上采用黄/绿双色组合。保护导线/保护联结导线的色标是绝对专用的。对于绝缘导线, 黄/绿双色组合应这样安排,即在任意15 mm长度的导线表面上,一种颜色的长度占30%〜70%,其余 部分为另一种颜色。
如果保护导线能容易地从其形状、位置、或结构(如编织导线、裸绞导线)识别,或者绝缘导线一时难 以购得,则不必在整个长度上使用颜色代码,而应在端头或易接近位置上清楚地标示GB/T 5465.2— 2008中5019图形符号(见图1)或用黄/绿双色组合标记。

图 1 GB/T 5465.2—2008 中 5019 图形符号
例外:保护联结导体可以用字母PB和和/或GB/T 5465.2—2008中5021图形符号(见图2)进行 标志。

图 2 GB/T 5465.2—2008 中 5021 图形符号
13.2.3中线的标识
如果电路包含只用颜色标识的中线,其颜色应为蓝色。为避免与其他颜色混淆,宜使用不饱和蓝, 这里称为“浅蓝”(见GB/T 7947-2010中5.2.2),如果选择的颜色作为中线的唯一标识,可能导致混淆
23
犌犅/犜5226.7—2020
的场合,不应使用浅蓝色来标记其他导线。
如果采用色标,用作中线的裸导线应在每个15 mm-100 mm宽度的间隔或单元内,或在易接近的 位置上用浅蓝色条纹作标记,或在导线整个长度上作浅蓝色标志。
13.2.4颜色的标识
当使用颜色代码作导线标识时,不是保护导线(见13.2.2)和中线(见13.2.3)标识时可采用下列 颜色:
黑、棕、红、橙、黄、绿、蓝、紫、灰、白、粉红、青绿(见GB/T 13534—2009)。
如果采用颜色作标识,宜在导线全长上使用带颜色的绝缘材料或以固定间隔在导线上和其端部或 在易接近的位置用颜色标记。
由于安全原因,在有可能与黄/绿双色组合发生混淆的场合,不应使用绿色或黄色。
可以使用上面列出颜色的组合色标,只要不发生混淆和不使用绿色或黄色,不过黄/绿双色组合标 记除外。
当使用颜色代码标识导线时,宜使用下列颜色代码:
——黑色:交流和直流动力电路;
——红色:交流控制电路;
——蓝色:直流控制电路;
——橙色:例外电路。
上述的例外允许绝缘材料不使用推荐的颜色(如多芯电缆)。
13.3 电柜内配线
电柜内的导线应固定并需保持在适当位置。非金属管道只有在用阻燃绝缘材料制造时才允许 使用。
要安装在电柜内的电气设备,宜设计和制作成允许从电柜的正面修改线路(见11.2.1)。如果不可 行,并且控制器件是从电柜的背后接线,则应提供进出门或能旋出的配电盘。
安装在门上或者其他活动部件上的器件,应使用适合部件频繁运动用的软导线连接。这些导线应 紧固在固定部件上和与电气连接无关的活动部件上。
不敷入管道的导线和电缆应牢固固定住。
引出电柜外部的控制配线,应采用接线座或连接插头/插座组合连接。对于插头/插座组合见 13.4.5 和 13.4.6。
动力电缆和测量检测电路的电缆可以直接接到预期连接的器件的端子上。
13.4 电柜外配线
13.4.1 一般要求
电缆或管道连同专用的管接头、密封垫等引入电柜的方法,应确保不降低防护等级(见11.3)。
同一电路的导线不应分布于不同的多芯电缆、导线管、电缆管道系统或电缆通道系统。构成同一电 路的若干多芯电缆并行安装时,上述要求不需要。多芯电缆并行安装时,如可能,每一根电缆应尽可能 包含每一相的一根相线和中性线。
13.4.2外部管道
连接电柜内电气设备的外部导线,应封闭在合适的管道(如导线管或电缆通道系统)中,如13.5所 述,有合适保护套的电缆,无论是否用电缆托架或电缆支承设施,都可以不需要管道安装。带有专用电 24
犌犅/犜5226.7—2020
缆的器件,如配有专用电缆的位置开关或接近开关,当其电缆适用,足够短,放置或保护得当,使损坏的 风险最小时,它们的电缆不必密封在管道中。与管道或多芯电缆一起使用的接头附件应适合于实际 环境。
如果与悬挂按钮站的连接一定要使用柔性连接,则应采用软导线管或软多芯电缆。悬挂站的重量 不应借助软导线管或多芯电缆来承受,除非是为此目的专门设计的导线管或电缆。
13.4.3机械的移动部件的连接
频繁移动的部件应按第12章的规定,使用适合于弯曲的导线连接。软电缆和软导管的安装应避免 过度弯曲和拉紧受力,尤其是在接头附近部位。
移动电缆的支承应使得在连接点上没有机械应力,也没有急弯。当用回环结构实现时,弯曲回环应 有足够的长度,以便使电缆的弯曲半径符合电缆制造商的规定,若无此规定,至少为电缆外径的10倍。
机械的软电缆安装和防护应使得电缆因使用不合理等因素引起外部损坏的可能性减到最小,软电 缆应防止:
--被机械自身辗压;
——被其他机械辗压;
——运动过程中与机械的构件接触;
——在电缆吊篮中敷入和敷出,接通或断开电缆盘;
——对花彩般垂挂或悬挂电缆施加冲击力和风力;
——与电缆收集器过度磨擦;
——暴露于过度的辐射热。
电缆护套应能耐受由于移动而产生的可预料到的正常磨损,并能经受环境污染的影响(如油、水、冷 却液、粉尘)。
如果移动电缆靠近运动部件,则应采取措施使运动部件和电缆之间至少应保持25 mm距离。如果 做不到,则应在二者之间安设遮栏。
电缆输送系统的设计应使得侧向电缆角度不超过5。,正在接近或离开电缆导向装置时应避免挠曲 扭转。
应有措施确保至少总有两圈软电缆缠绕在电缆盘上。
起导向和携带软电缆的装置应设计成电缆在所有弯曲点处的内弯曲半径不小于表5规定的值,除 非考虑了允许的拉力和预期疲劳寿命或与电缆制造商另有协议。
表5强迫导向时软电缆允许的最小弯曲半径
|
用途 |
电缆直径或扁平电缆的厚度犱/mm | ||
|
犱≤8 |
8<犱≤20 |
犱>20 | |
|
电缆盘 |
6犱 |
6犱 |
8犱 |
|
导向轮 |
6犱 |
8犱 |
8犱 |
|
花彩般垂挂装置 |
6犱 |
6犱 |
8犱 |
|
其他 |
6犱 |
6犱 |
8犱 |
两弯之间的直线段应至少为电缆直径的20倍。
如果软导线管靠近运动部件,则在所有运行情况下其结构和支承装置均应能防止对软导线管的
损伤。
软导线管不应用于易受快速和频繁的活动的连接,除非是为此目的专门设计的。
25
犌犅/犜5226.7—2020
13.4.4机械上器件的互连
安装在机械上的几个器件(例如位置传感器、按钮)串联或并联连接时,这些器件间宜通过构成中间 测试点的端子进行连接。这些端子应方便安装、充分保护,并在有关图上示出。
13.4.5插头/插座组合
电柜内部端接部件或器件所使用的固定插头/插座组合(不是软电缆)或部件连接总线系统所使用 的插头/插座组合,不属于本条所述的插头/插座组合。
适用时,插头/插座组合的安装应满足下列要求:
a)断开后仍然有电的元件至少应有IP2X或IPXXB的防护等级,并考虑要求的电气间隙和爬电 距离。PELV电路除外。
b)插头/插座组合的金属外壳应连接保护联结电路。PELV电路除外。
C)预期带动力负载但在带负载条件下不能断开的插头/插座组合应有保持措施以防意外或事故 断开,并应有清晰标记,表明在带负载条件下不能断开。
d)如果在同一电气设备上使用几个插头/插座组合,则相关的组合应清楚标识,宜采用机械编码 以防相互插错。
当根据a)安装后,插头/插座组合的型式应在任何时间,包括连接器插入和拔出期间,防止与带电 部分意外接触。防护等级应至少为IP2X或IPXXB。PELV电路除外。
当插头/插座组合包含保护联结电路用触点时,应使它首先接通,最后断开。
在带负载条件下连接或断开的插头/插座组合应有足够的负载分断能力。当插头/插座组合额定电 流为30 A或更大时,应与开关器件联锁以便只有当开关器件处在断开位置时才能连接和断开。
插头/插座组合额定电流大于16 A时,应有保持措施以防意外或事故断开。
插头/插座组合的意外或事故断开会引起危险情况时,应有保持措施。
13.4.6装运拆卸
为了装箱运输需要拆断布线时,应在分断处提供接线端子或提供插头/插座组合。这些接线端子应 适当封装,插头/插座组合应能防护运输和存储期间实际环境的影响。
13.4.7备用导线
应考虑提供维护和修理用的备用导线。当提供备用导线时,应把它们连接在备用端子上,或用和防 护接触带电部分同样的方法予以隔离。
13.5管道、接线盒与其他线盒
13.5.1 一般要求
管道应提供适合用途的防护等级(见GB/T 4208—2017)。
可能与导线绝缘接触的锐棱、焊確、毛刺、粗糙表面或螺纹,应从管道和接头附件上清除。必要时应 提供由阻燃、耐油绝缘材料构成的附加防护以保护导线绝缘。
易存积油或水的接线盒、引线箱、电缆管道装置中应允许留有直径6 mm的排泄孔。
为了防止电气导线管与油、气和水管混淆,电气导线管宜使用实体隔离安设,或者做出明显标记。
管道和电缆托架应采用刚性支承,其位置应离运动部件有足够的距离,并使损伤或磨损的可能性减 至最小。在要求有人行通道区域内,管道和电缆托架的安装应至少高于工作面2 m。
部分被遮盖的电缆托架不应看作管道或电缆通道系统,所用电缆的类型应适于安装在开式电缆托
26
犌犅/犜5226.7—2020
架上。
管道的尺寸和排列宜便于导线和电缆插入。
13.5.2金属硬导线管及管接头
金属硬导线管及管接头应为镀锌钢或适合使用条件的耐腐蚀材料制成。应避免使用不同金属,因 为它们的接触中会产生电位差腐蚀作用。
导线管应牢固固定在其位置上并将其两端支承住。
管接头应与导线管相适应并适用。应使用带螺纹的管接头。除非由于结构上的困难妨碍装配。如 果使用无螺纹管接头,则导线管应牢固固定在设备上。
导线管的折弯不应损坏导线管,也不应减小导线管的有效内径。
13.5.3金属软导线管及管接头
金属软导线管应由金属软管或编织线网铠装组成,它应适用于预期的实际环境。
管接头应与软导线管相适应并适用。
13.5.4非金属软导线管及管接头
非金属软导线管应耐弯折,并应具有与多芯电缆护套类似的物理性能。
这种软导线管应适用于预期的实际环境。
管接头应与软导线管相适应并适用。
13.5.5电缆通道系统
电柜外部的电缆通道系统应采用刚性支承,并应与机械的运动部件或污染源相隔离。
盖板的形状应覆盖满周边及加密封垫。盖板应采用适当方法连接到电缆通道系统上。对于水平安 装的电缆通道系统,其盖板不应装在底部,除非为这样安装的专门设计。
如果电缆通道系统是分段提供的,则各段之间的联结应紧密配合,但不需要加密封衬垫。
除接线或排水需用孔外不应有其他开口。电缆通道系统不应有敞开的不用的出砂孔。
13.5.6机械的隔间和电缆通道系统
应允许用机械立柱或基座内的隔间或电缆通道系统去围护导线,只要该隔间或电缆通道系统是与 冷却液槽及油箱隔离并完全封闭的。敷入在封闭的隔间或电缆通道系统中的导线应被固紧,其布置应 使得它们不易受到损坏。
13.5.7电动机的接线盒
电动机的接线盒应密闭,仅与电动机及安装在电动机上的器件(如制动器、温度传感器、反接制动开 关或编码器)进行连接。
14电动机及有关器件
电动机及有关器件包括一般要求、电动机外壳、电动机尺寸、电动机安装于隔间、电动机的选择依 据、机械制动用保护器件,均应符合GB/T 5226.1—2019中第14章的规定。
如果在某些紧急情况下,不能通过示教器操作来控制移动工业机器人,此时需要通过手动操作松开 各轴电动机抱闸来移动工业机器人。在松开抱闸前,应做好安全防护,对要松开抱闸的相应轴应做好保 护,以免松开抱闸后工业机器人手臂跌落砸伤人员。
27
犌犅/犜5226.7—2020
15插座和照明
当需要时,插座和照明(包括附件用插座、机械和电气设备的局部照明),应符合GB/T 5226.1— 2019中第15章的规定。
16标记、警告标志和参照代号
16.1概述
警告标志、铭牌、标记和识别牌应经久耐用,经得住复杂的实际环境影响。
16.2警告标志
16.2.1电击危险
不能清楚表明其中装有会引起电击风险的电气设备的外壳,都应具有标记GB/T 5465.2—2008中 5036图形符号的警告标志(见图3)。
图3防电击危险图形符号
警告标志应在外壳门或盖上清晰可见。
警告标志在下列情况可以省略:
——装有电源切断开关的外壳;
——人机接口或控制站;
——自带外壳的单一器件(如位置传感器)。
注:防触电警告标志为黄底、黑边及黑色闪电的三角图形符号。
16.2.2热表面危险
风险评价表明需要警告防止电气设备危险表面温度的可能性时,应具有标记GB/T 5465.2—2008 中5041图形符号的警告标志(见图4)。
图4防热表面危险图形符号
16.3功能识别
控制器件、视觉指示器,应在器件上或在其附近清晰耐久地标出与它们功能有关的标记。
28
犌犅/犜5226.7—2020
16.4电气设备外壳的标记
下列信息应有清晰耐久地标记,在电气设备/系统安装后使人们在接收引入电源的外壳上清晰 可见:
——供方的名称或商标;
——认证标记或可能由当地或特定区域要求的其他标记,必要时;
——型式代号或模式,适用时;
--序列号,适当时;
--主要文件号(见GB/T 19529—2004),适用时;
——额定电压、相数和频率(如果是交流),每个引入电源的满载电流。
上述信息宜在主引入电源附近提供。
16.5参照代号
所有电柜、装置、控制器件和元件应清晰标出与技术文件相一致的参照代号。
17技术文件
17.1通则
应提供必要的信息(资料),以识别、运输、安装、使用、维护、报废和处置机械电气设备。
注1:文件有时以纸质形式提供,因为不能确定用户是否可以阅读到电子版或互联网形式的说明书。然而,与纸版 说明书相比,如果可以得到电子版或互联网形式的说明书通常会更有益处,因为如果纸版文件丢失,用户可以 通过下载电子版的方式来恢复文件。必要时,该方式也便于文件更新。
注2:在我国使用的电气设备/系统的技术文件及信息资料要有中文语言版本。
17.2有关电气设备的资料(信息)
电气设备/系统应提供下列资料(信息):
a)当提供多个文件时,要为整体机械电气设备/系统提供一个主要文件,同时列出与设备/系统相 关的补充文件。
b)电气设备的标识(见16.4)。
C)安装和配置资料(信息)包括:
—— 电气设备的配置和安装的描述及其与电源和其他源的连接;
——对于各引入电源,电气设备短路电流额定值;
—-额定电压、相数和频率(若是AC.),配电系统形式(TT,TN,IT)和各引入电源满载电流; ——对于各引入电源的任何附加电源要求(例如,最大电源阻抗、漏电流);
——移动和维护电气设备要求的空间;
——确保不损害冷却布局的安装要求;
——适当时,环境限制(例如,照明、振动、EMC环境和大气污染);
——适当时,功能限制(例如,峰值起动电流和允许的电压降);
——对于涉及电磁兼容性的电气设备的安装应采取的预防措施。
d)在机械邻近区域(例如,2.5 m以内),可同时接近的外部可导电部分的连接说明,例如下列保 护联结电路:
--金属管;
——防护栏。
29
犌犅/犜5226.7—2020
e)功能和操作资料(信息),适用时包括:
—— 电气设备的结构概略图(例如,结构图或概略图);
--如需预期使用时,编程或配置的步骤;
--意外停止后重新起动的程序;
——操作顺序;
——若采用电池来记忆机器人伺服电动机多圈位置数据(即驱动的关节位置)的情况下,应在 工业机器人本体适当位置或在使用说明书(使用手册)上说明电池的电量检测和更换注意 事项。
f)电气设备的维护信息,适当时包括:
——功能测试的频次和方法;
——有关安全维护程序的说明,以及需要时暂停安全功能的场合和/或保护措施程序的说明 (见第9章);
——有关调整、修理和预防性维护的频次及方法的指南;
——用于替换的电气零部件互连的详细说明[例如,电路图和/或互连图(表)];
——所需专用装置或工具的信息;
备件信息;
——有关可能的剩余风险的信息,是否需要任何特殊培训的指导和任何必要的个人防护设备 的规范;
——如适用,仅熟练人员和受过训练人员才能使用的钥匙和工具的说明;
——修理或修改后,确认有关安全控制功能,以及必要时定期测试的资料(信息),如适当。
g)如适当,搬运、运输和储存的信息(例如,尺寸,重量,环境条件,可能的老化限制)。
h)正确拆卸和处理部件的信息(例如,回收或处置)。
30
犌犅/犜5226.7—2020
附录A
(规范性附录)
工业机器人电气设备/系统电磁兼容性(EMC)的要求与试验方法
A.1电磁兼容性一一发射
A. 1.1要求
电气设备/系统电磁兼容性的发射分为:
——辐射干扰;
——传导干扰。
电气设备/系统的发射限值见表A.1。
表A.1发射限值
|
端口 |
频率范围 |
严酷等级(标准) 在距离10 m处测得 |
严酷等级(可选) 在距离30 m处测得 |
依据标准 |
|
外壳端口 (辐射干扰) |
30 MHz~230 MHz |
40 dB(μV∕m)准峰值 |
30 dB(μV∕m)准峰值 |
GB23313—2009 |
|
230 MHz~1000 MHz |
47 dB(μV∕m)准峰值 |
37 dB(μV∕m)准峰值 | ||
|
交流电源端口 (传导干扰) |
0.15 MHz ~0.5 MHz |
79 dB(μV∕m)准峰值 66 dB(μV∕m)平均值 |
— |
GB23313—2009 |
|
0.5 MHz~30 MHz |
73 dB(μV∕m)准峰值 60 dB(μV∕m)平均值 |
— |
A.1.2检验(试验)
辐射干扰、传导干扰试验配置及试验测量方法按表A.2及表A.3的规定,试验结果应符合表A.1 的规定。
表A.2辐射干扰测量
|
项目 |
内容 |
|
试验目的 |
^定电气设备及系统的辐射干扰性能 |
|
试验方法 |
见 GB/T 6113.203—2016 |
|
试验配置 |
见 GB/T 6113.203—20163GB/T 6113.104—2016, GB/T6113.101—2016 |
|
测量距离b |
见表A.1 |
|
___________安装/支撑的细则___________ |
由制造厂商规范确定 |
|
频率范围 |
见表A.1 |
|
_____________限值_____________ |
见表A.1 |
|
.试验可在不具备户外试验场的物理特点的辐射试验场进行。如果按GB/T 6113.104—2016测得的水平和垂直 场强衰减测量值处于GB/T 6113.104—2016中给出的理论场强衰减±4 dB之内,则频率范围在30 MHZ〜 1GHz的辐射试验场应是可接受并有效的。这些辐射试验场地应该考虑到并验证在30 MHZ〜IGHZ频率范 围内的测试距离。应有证据证明这些场地能得到有效的测试结果。 b测量距离是被试电气设备及系统(或其外壳)与用于试验现场测量的接收天线之间的距离,或者是试品所在建 筑物的外墙与用于现场测量的接收天线之间的距离。 | |
31
犌犅/犜5226.7—2020
表A.3传导干扰测量
|
项目 |
内容 |
|
试验目的 |
确定数控装置的传导干扰性能 |
|
试验方法 |
见 GB/T 6113.201—2018 |
|
试验配置 |
见 GB/T 6113.201—2018 及 GB/T 6113.102-2018 |
|
施加端口 |
交流电源端口 |
|
安装/支撑的细则 |
由制造厂商规范确定 |
|
频率范围 |
见表A.1 |
|
限值 |
见表A.1 |
A.2电磁兼容性一一抗扰度
A.2.1静电放电抗扰度
A.2.1.1 要求
电气设备/系统运行时,对外壳端口、操作人员经常触及的所有部位与保护接地端口间进行静电放 电试验,接触放电电压为6 kV,空气放电为8 kV,试验中电气设备/系统具备的所有控制、显示等功能 均应正常。
性能判据按B级验收(见A.2.8)。
A.2.1.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备/系统的静电放电抗扰度性能。
b)试验方法:见 GB/T 24112—2009。
C)试验仪器及参数:
——静电放电发生器。
——输出电压示值的允许偏差为±5%。
d)试验条件:
--接触放电±6 kV,空气放电±8 kV。
..试验室的相对湿度:30%〜60%。
e)性能判据:B级(见A.2.8)。
f) 试验程序:
1)电气设备/系统经初始检测后,将其放置于绝缘试验工作台上,按规定要求连接好导线,并 通电让其在空载条件下运行。对于台式结构,采用木制式绝缘支架与接地参考平面隔开, 高度为800 mm。
2)在示教盒面板、按钮、键盘、电柜及连接器等凡是手能触摸的部位,用20次/s的速度进行 放电,以寻找静电放电的敏感点。
3)在敏感点以单次放电的方式,在选定点与④之间施加10次单次放电,连续单次放电之间 的时间间隔不少于1s。
4)首选接触式放电,非绝缘漆(不属于绝缘材料)应使用接触放电头刺破漆膜放电。若被测
32
犌犅/犜5226.7—2020
表面为绝缘材料则应采用空气放电。
5)按性能判据B级验收。
A.2.2电快速瞬变脉冲群抗扰度
A.2.2.1 要求
电气设备/系统运行时,分别在交流电源端口与保护接地端口④之间加入峰值为2kV、重复频率 为5 kHz的脉冲群,时间为1 mm;在控制、1/()信号、数据及测量端口(或接口)电缆上用耦合夹加入峰 值为1 kV、重复频率为5 kHz的脉冲群,时间为1 mm。试验中试品具备的控制、显示等功能应均正常。
性能判据按B级验收。
A.2.2.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备/系统的快速瞬变脉冲群抗扰度性能。
b)试验方法:见 GB/T 24111—2009。
C)试验仪器及参数:
快速瞬变脉冲群发生器,其输出波形应符合GB/T 24111—2009的要求。
d)试验条件:
——电源端口/接口(交流/直流电源线、保护联接线、电机电源线):2 kV/5 kHz;
——控制与测量信号接口(电平、脉冲、模拟等信号线):1 kV/5 kHz;
—-信号端口/接口(RS 232/RS 485、USB、键盘线、现场总线等):1 kV/5 kHz。
C)性能判据:B级(见α.2.8)o
f) 试验程序:
1)电气设备及系统经初始检测后,将其放置于绝缘试验工作台上,按规定要求连接好导线, 并通电让其在空载条件下运行。对于台式结构,采用木制式绝缘支架与接地参考平面隔 开,高度为800 mm。
2)交流电源线、直流电源线与保护联接线:保护联接线应与参考接地板相连。使用电源耦 合网络,电源线长度不超过1 m。若超过1 m且又不能拆下时,则应把电源线弯成直径 400 mm的平坦环路,按100 mm的高度与参考地平面平行放置。
3)对于单相或三相电源上的各条线包括④线应分别施加干扰,单相电源还应对L、N、④线 同时施加干扰。试验时,在试品的交流供电电源端口施加电压峰值为2(1±10%)kV,单 脉冲宽度为50(1±30%)ns,脉冲上升时间为5(1±30%)ns,脉冲重复频率为5(1 士 20%) kHz的脉冲数,脉冲群持续时间为15(1±20%)ms,其间隔为300( 1 士 20 %) ms,每次为正 极/负极性脉冲群干扰时间各持续1 mm。
4)测量与控制信号线、信号线:使用电容耦合夹,注意调整耦合夹与试品之间的信号线的长 度应符合GB/T 24111-2009的规定。试验时,用耦合夹分别在控制装置的I/O信号、控 制、测量端(接)口电缆上施加电压峰值为1(1±10%)kV,单脉冲宽度为50(1±30%)ns,脉 冲上升时间为5(1±30%)ns,脉冲重复频率为5(1±20%)kHz的脉冲数,脉冲群持续时 间为5(1±20%)ms,其间隔为300(1±20%)ms,每次为正极/负极性脉冲群干扰时间各 持续1 min。
5)按性能判据B级验收。
33
犌犅/犜5226.7—2020
A.2.3浪涌(冲击)抗扰度
A.2.3.1 要求
电气设备/系统运行时,分别在交流输入电源端口的相线之间叠加峰值为1 kV的浪涌(冲击)电 压;在交流输入电源端口的相线与保护接地端口④间叠加峰值为2kV的浪涌(冲击)电压。浪涌(冲 击)重复率为1次/min,极性为正极/负极各进行5次,试验中试品具备的所有控制、显示等功能均应 正常。
在控制与测量信号接口(电平、脉冲、模拟等信号线)叠加峰值为1 kV的浪涌(冲击)电压,浪涌(冲 击)重复率为1次/min,极性为正极/负极各进行5次,试验中试品具备的所有控制、显示等功能应 正常。
性能判据按B级验收(见A.2.8)。
注1:仅在信号线的总长度超过30 m时,才需要进行本项试验。
注2:信号线如采用带屏蔽的电缆,直接耦合到屏蔽层。现场总线或其他由于技术原因不适用浪涌保护器件的信号 接口不按此要求。耦合/去耦网络的影响会造成试品正常功能不能实现时,不进行控制与测量信号接(端)口 的浪涌试验。
A.2.3.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备/系统的浪涌抗扰度性能。
b)试验方法:见 GB/T 22840—2008。
C)试验仪器及参数:
浪涌发生器,其输出波形应符合GB/T 22840—2008的要求。
d)试验条件:
——电源端口(交流电源线、保护接地线④):1 kV(线-线耦合),2 kV(线-地耦合);
——控制与测量信号接口(电平、脉冲、模拟等信号线):1 kV(线-地耦合)。
C)性能判据:B级(见A.2.8)。
D 试验程序:
1)电气设备/系统经初始检测后,将其放置于绝缘试验工作台上,按规定要求连接好导线,并 通电让其在空载条件下运行。对于台式结构,采用木制式绝缘支架与接地参考平面隔开, 高度为800 mm。
2)对于交流电源端口的电源线:浪涌应施加在电压波形的0。、90°和270°相角位置上。试验 电压施加方式为线-线之间为1 kV;线-④之间为2 kV;线-中线之间为2 kV。试验时应 不加外部浪涌保护器件和外部电源滤波器。电源耦合网络与被测系统之间的连线长度应 不超过2 m。
3)试验时,在试品的交流供电电源端口施加浪涌脉冲电压,该电压波形为快速上升后缓慢下 降,脉冲幅度为2(1±10% )kV,脉冲宽度为50(1±20%)μs,上升时间为1.2(1±30%) μs,脉冲重复率为1次/min,极性为正极/负极,试验时正负各作5次。
4)试验按从低到高分电压等级进行。例如,对于2 kV的试验要求,应按500 V、1 kV、2 kV 顺序逐级升压测试,每一级测试电压都应施加正极/负极性各5次。
5)按A.2.3.1仅对控制与测量信号接口有浪涌试验要求的试品,在控制与测量信号接口(电 平、脉冲、模拟等信号线)叠加峰值为1 kV的浪涌(冲击)电压,该电压波形为快速上升后 缓慢下降,脉冲幅度为1(1±10%)kV,脉冲宽度为50 (1±20%)μs,上升时间为1.2 (1±
34
犌犅/犜5226.7—2020
30%)μs,脉冲重复率为1次/mm,极性为正负/负极,试验各作5次。
6)试验按性能判据B级验收。
7)由于浪涌试验有可能损坏试品,一般应放在各项试验的最后进行。
A.2.4电压暂降和短时中断抗扰度
A.2.4.1 要求
电气设备/系统运行时,在交流输入电源(端口)任意时间电压幅值降为额定值的70% (试验等级 犝T为70%,实际降了额定电压值的30%),持续时间500 ms;电压幅值降为额定值的40% (试验等级 UT为40%,实际降了额定电压值的60%),持续时间200 ms,相继间隔时间为10 s,两种试验等级任选 一种。
在交流输入电源(端口)任意时间电压短时中断(电压幅值降为额定值的100%,即试验等级Ut为 0,实际降了额定电压值的100%)时间3 ms,相继中断间隔时间为10 s。
电压暂降和短时中断各进行3次,试品具备的所有控制、显示等功能均应正常。
性能判据按表A.4中规定验收。
A.2.4.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备/系统的交流电源电压暂降和短时中断抗扰度性能。
b)试验方法:见 GB/T 22841—2008。
C)试验仪器及参数:
电压暂降和短时中断发生器,其输出波形应符合GB/T 22841-2008的要求。
d)试验条件及性能判据:
试验条件及性能判据见表A.4。
表A.4电压暂降和短时中断试验等级
|
试验等级/(%UT) |
电压暂降、短时中断/(%UT) |
持续时间/ms |
性能判据 |
|
0 |
100 |
— |
A |
|
70 |
30 |
500 |
A |
|
40 |
60 |
200 |
C |
|
注1:电压短时中断是电压幅值降为额定值的100% ,即试验等级Ut为0的电压暂降(实际降了额定电压值 的 100%)。 注2:性能判据参见A.2.8。 | |||
e)试验程序:
1)试品经初始检测后,将其放置于绝缘试验工作台上,按规定要求连接好导线,并通电让其 在空载条件下运行。对于台式结构,采用木制式绝缘支架与接地参考平面隔开,高度为 800 mm。
2)该试验应作用于所有外部交流电源输入端口。额定电压Ut应为试品的额定交流电源 电压。
3)试验时,电源电压应在规定的2%范围内,发生器的过零控制应有±10%的准确度。
4)试验等级0%Ut相当于电压中断,试验时的初始相角应为任意。对三相电源系统,应分 别逐相电压中断测试和对三相电压同时中断测试。电源线长度应为适合试品最短可能的
35
犌犅/犜5226.7—2020
线长。
5)按表A.4中规定的试验等级组合测试,其中等级40%UT与70%UT都为电压跌落试验, 可以任意选一种试验通过。每种试验等级组合应至少测试三次,并且每两次之间间隔应 至少为10 so
6)按性能判据C级,当试品出现关机、系统保护和故障后,允许在人工操作下按预定起动程 序重新启动。
A.2.5射频电磁场辐射抗扰度
A.2.5.1 要求
电气设备/系统运行时,在频率范围80 MHZ〜1 000 MHz,场强10 V/m,信号调幅80%幅度调制 AM(频率1 kHz)的条件下进行试验,试验中试品具备的所有控制、显示等功能均应正常。
性能判据按A级验收(见A.2.8)。
A.2.5.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备/系统的射频电磁场辐射抗扰度性能。
b)试验方法:见 GB/T 17626.3—2016。
C)试验仪器及参数:
符合GB/T 17626.3-2016规定的设备、电波暗室。
d)试验条件:
在电波暗室里进行。
e)性能判据:A级(见A.2.8)。
f) 试验程序:
试验作用于电柜(或机箱),见GB/T 17626.3—2016。
A.2.6射频场感应的传导骚扰抗扰度
A.2.6.1 要求
电气设备及系统运行时,在频率范围0.15 MHZ〜80 MHz,射频电压10 V、信号调幅80%及幅度调 制AM(频率1 kHz)的条件下进行试验,试验中试品具备的所有控制、显示等功能均应正常。
性能判据按A级验收(见A.2.8)。
注:当使用的电源线或信号线总长度允许超过3 m时才进行测试。
A.2.6.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备/系统的射频场感应的传导抗扰度性能。
b)试验方法:见 GB/T 17626.6—2017。
c)试验仪器及参数:
符合GB/T 17626.6—2017规定的设备与配置。
d)试验条件:
频率范围0.15 MHZ〜80 MHz,射频电压10 V,信号调幅80%,幅度调制AM(频率1 kHz)。
e)性能判据:A级(见A.2.8)。
f) 试验程序:
36
犌犅/犜5226.7—2020
作用于交流电源端口的电源线、控制与测量接口的信号线,见GB/T 17626.6—2017。
A.2.7工频磁场抗扰度
A.2.7.1 要求
电气设备/系统运行时,在频率50 Hz,磁场强度30 α/m的条件下进行试验,试验中试品具备的所 有控制、显示等功能均应正常。
性能判据按A级验收(见Λ.2.8)o
A.2.7.2检验(试验)
试验方法如下:
a)试验目的:确定电气设备及系统对工频磁场抗扰度的性能。
b)试验方法:见 GB/T 17626.8—2006。
C)试验仪器及参数:工频电磁场发生器、感应线圈、地参考平面,并应符合GB/T 17626.8—2006 的第6章、第7章、第8章的要求。
d)试验条件:
频率50 Hz,磁场强度30 A/m。
C)性能判据:A级(见A.2.8)。
f) 试验程序:
实验室的电磁条件应能保证正确操作被测试品而不致影响试验结果,否则试验应在法拉第笼
中进行。实验室的背景电磁场至少应低20 dB(具体试验见GB/T 17626.8—2006)。
注:带有对工频电磁场敏感的零部件的电气设备/系统才进行本项试验。
A.2.8抗扰度性能判据
电气设备/系统抗扰度的性能判据按GB/T 21067-2007中第5章的性能判据(A、B、C)要求进 行,即:
a)性能判据A:在标准限值内性能正常;
b)性能判据氏功能或性能暂时降低或丧失,但能自行恢复;
c)性能判据C:功能或性能暂时降低或丧失,但需操作者干涉或系统复位才能恢复。
37
犌犅/犜5226.7—2020
参考文献
[口 GB/T 12643—2013 机器人与机器人装备 词汇(ISO 8373 : 2012 ,IDT)
38