CS 25. 040. 30
CCS J 28
中华人民共和国机械行业标准
JB/T 14402—2022
上下料桁架机器人
Loading and unloading gantry robot
(报批稿)
XXXX-XX-XX 发布
XXXX-XX-XX
中华人民共和国工业和信息化部 发布
JB/T 14402—2021
目 次
前言...................................................................................................................................................................III
1 范围.................................................................................................................................................................1
2规范性引用文件.............................................................................................................................................1
3术语和定义.....................................................................................................................................................1
4分类与基本参数.............................................................................................................................................2
4. 1分类.........................................................................................................................................................2
4.2基本参数.................................................................................................................................................3
5技术要求.........................................................................................................................................................3
5. 1 一般要求.................................................................................................................................................3
5.2 外观和结构.............................................................................................................................................4
5.3正常工作条件.........................................................................................................................................4
5.4功能.........................................................................................................................................................4
5.5连续运转.................................................................................................................................................5
5.6 操作方式.................................................................................................................................................5
5. 7机器人与机械加工设备联机信号传输................................................................................................5
5.8 液压系统.................................................................................................................................................6
5.9 气动系统.................................................................................................................................................6
5. 10 安全.......................................................................................................................................................7
5. 11电磁兼容性...........................................................................................................................................7
5.12 噪声.......................................................................................................................................................8
5. 13成套性...................................................................................................................................................8
5. 14 可靠性...................................................................................................................................................8
5.15耐振性...................................................................................................................................................8
5.16耐运输性...............................................................................................................................................8
6 试验方法.........................................................................................................................................................8
6. 1试验条件.................................................................................................................................................8
6.2 外观和结构.............................................................................................................................................8
6. 3 功能试验.................................................................................................................................................8
6.4连续运转试验.........................................................................................................................................8
6.5急停功能试验.........................................................................................................................................9
6.6重复定位精度试验.................................................................................................................................9
6.7单轴最大速度试验.................................................................................................................................9
6.8 操作方式试验.........................................................................................................................................9
6. 9机器人和机床联机传输信号试验.........................................................................................................9
6. 10抓取额定负载.....................................................................................................................................10
I
JB/T 14402—2021
6. 11 安全检验.............................................................................................................................................10
6. 12 噪声试验.............................................................................................................................................10
6. 13 成套性检查.........................................................................................................................................10
6. 14耐振性试验.........................................................................................................................................10
6. 15 可靠性.................................................................................................................................................10
6. 16 耐运输性试验.....................................................................................................................................11
6. 17检验分类.............................................................................................................................................11
6. 18 出厂检验.............................................................................................................................................11
6. 19 型式检验.............................................................................................................................................11
7 标志、包装、运输和贮存...........................................................................................................................12
7. 1固定标牌...............................................................................................................................................12
7. 2 包装标志...............................................................................................................................................12
7. 3 包装.......................................................................................................................................................12
7. 4 运输.......................................................................................................................................................13
7. 5 贮存.......................................................................................................................................................13
II
JB/T 14402—2021
t / —*—
刖 5
本文件按照GB/T 1.1-2020《标准化工作导则 第1部分:标准化文件的结构和起草规则》的规 定起草。
请注意本文件的某些内容可能涉及专利,本文件的发布机构不承担识别专利的责任。
本文件由中国机械工业联合会提出。
本文件由全国自动化系统与集成标准化技术委员会(SAC/TC159)归口
本文件起草单位:宁夏巨能机器人股份有限公司、宁夏机械工业协会、北京机械工业自动化研究所 有限公司、深圳国技仪器有限公司、青岛科捷机器人有限公司、遨博(北京)智能科技有限公司。
本文件起草人:李志博、宋明安、董德、麻辉、车延明、宋凯鑫、鲍鲁海、郭强、陈宏宇、燕向阳、 刘颖、朱平、陶喜冰、魏洪兴。
本文件为首次发布。
III
1
范围
JB/T 14402—2021
上下料桁架机器人
本文件规定了上下料桁架机器人的术语和定义、分类与基本参数、技术要求, 试验方法、检验规则 ,标志、包装、运输及贮存等。
本文件适用于机械加工设备用自动上下料桁架机器人及其衍生机型的制造。
2规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注R期的引用文件,
仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本
文件。
GB/T GB/T GB/T 简易法
GB/T GB/T GB/T GB/T
191-2016
3766-2015
3768-2017
4768-2008
4879-2016
5048-2017
包装储运图示标志
液压传动系统及其元件的通用规则和安全要求
声学声压法测定噪声源声功率级和声能量级采用反射面上方包络测量面的
防霉包装 防锈包装 防潮包装
5080. 1-2012可靠性试验第1部分:试验条件和统计检验原理
GB 5226. 1-2008机械电气安全 机械电气设备 第1部分:通用技术条件
GB/T 7932-2017气动对系统及其元件的一般规则和安全要求
GB 11291. 1-2011工业环境用机器人安全要求第1部分:机器人
GB/T 12642-2013工业机器人性能规范及其试验方法
GB/T 12643-2013机器人与机器人装备词汇
GB/T 17421.2-2016机床检验通则第2部分:数控轴线的定位精度和重复定位精度的确定
GB/Z 19397-2003工业机器人电磁兼容性试验方法和性能评估准则指南
GB 50040-1996动力机器基础设计规范
JB/T 5063-2014搬运机器人通用技术条件
JB/T 8896-1999工业机器人验收规则
3术语和定义
GB/T 12643-2013界定的以及下列术语和定义适用于本文件。
3. 1
上下料桁架机器人(以下简称机器人)Ioading and unloading gantry robot
1
JB/T 14402—2021
由支撑立柱、横轴、竖轴、托板等单元组成,具有在机械加工设备间搬运及交换工件的能力,能够 执行直线或旋转运动,并按照程序自动运行的机器人。
托板pallet
衔接横轴单元与竖轴单元之间的承载受力结构单元。
4分类与基本参数
4.1分类
4.1.1按照信号传输方式分为:
a)有线机器人;
b)无线机器人。
4.1.2按照伺服轴数分为:
a)两轴机器人;
b)三轴机器人;
c)多轴机器人。
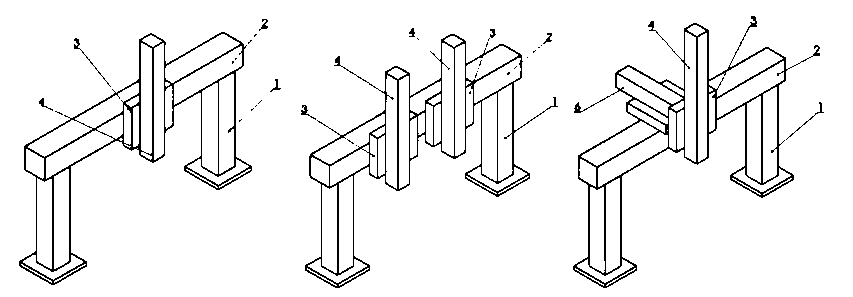
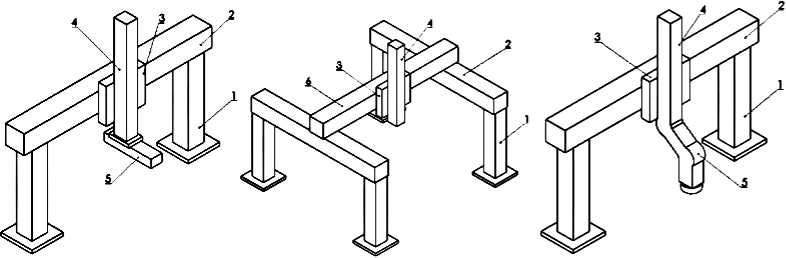
4.1.3按照结构形式分为:
a)单竖轴型机器人,见图1(a);
b)双竖轴型机器人,见图1 (b);
c)上三轴型机器人,见图1 (C):
d)下三轴型机器人,见图1 (d);
e)龙门型机器人,见图1 (e);
f)复合型机器人,见图1 (f)。
标引序号说明:
1-立柱;2-横轴X; 3-托板;4-竖轴Z; 5-复合轴;6-Y轴。
(a)
(b)
(c)
2
JB/T 14402—2021
(d) (e) Cf)
图1结构形式示例图
4.2基本参数
基本参数应符合表1的规定。
表1基本参数
|
序号 |
抓取额定负荷 kg |
水平轴最大速度 m/min |
竖轴最大速度 m/min |
重复定位精度 mɪɪi |
|
1 |
额定负荷VloO |
250 |
140 |
W0∙2 |
|
2 |
IOOW额定负荷<500 |
120 |
100 |
≤0. 5 |
|
3 |
500W额定负荷W3500 |
80 |
60 |
≤0. 8 |
5技术要求
5. 1 -般要求
机器人除满足JB/T 5063-2014中6. 1要求外,还应满足以下要求:
a)机器人夹持器在对应各轴以最大速度运动时能够可靠抓取额定负荷;
b)工件重量超过IOOkg时,竖轴应采用除电机外第二种安全制动装置,防止电机失效后竖轴滑落;
C)当上下料精度小于机器人重复定位精度要求时,应有机器人浮动或手腕浮动功能,并具有上下 料导向装置;
d)动力线和信号线应分开布置,并采取屏蔽、双绞等抗干扰措施;
e)机器人控制电柜应有良好的通风和散热措施;
f)机器人外部通讯应具有I/O或总线接口:
g)机器人循环时间应满足自动线节拍要求。
5. 2外观和结构
外观和结构应满足以下要求:
a)机器人结构应布局合理,符合人机工学要求,操作方便,便于维修;
b)机器人成套设备中,所有紧固部分应无松动,活动部分润滑状况良好;
c)铭牌文字、符号、标志应清晰、端正,各轴应有轴号和运动方向的标识;
3
JB/T 14402—2021
d)机器人表面不得有裂缝、凹痕和变形;漆膜及镀层应均匀,无起泡、划伤、脱落和磨损等缺陷; 金属零件不应有锈蚀及其它机械损伤;
e)当使用滚轮导轨结构时;其精度要求如下:
..基准导轨直线度不大于0. 05mm/πi:
..导轨接缝小于0. 03mm、高度差不大于0. 03mm;
——辅助导轨与基准导轨的相对平行度在托板宽度范围内不大于0. 05mm;
一一齿条与基准导轨的平行度在托板宽度范围内不大于0. 05mm。
5.3正常工作条件
机器人的工作条件要求:
a) 环境温度0℃〜40℃;
b)环境相对湿度不大于85%;
c)电源电压AC:三相380V、单相220V其波动范围不超过额定电压的±10紀
d) 电源频率为50Hz±lHz;
e)周围无腐蚀性介质;
f) 气源压力 0. 4MPa~0. 6MPa;
g)设备安装地基应符合GB 50040-1996的规定。
5.4功能
5.4.1机器人对工件进行操作时,各轴动作应平稳、准确可靠。
5.4.2机器人的操作开关、按钮、指示灯、报警装置及联锁功能应正常、灵活、安全、可靠。
5.4.3在操作过程中,指令与动作应协调・致。
5.4.4显示装置应清晰显示各轴运行时的负载、速度及位移量等信息、,数据应准确、可靠。
5.4.5机器人的运行速度应能实现倍率控制。
5.4. 6机器人应具有与其它自动化设备联机运行的功能。
5. 4. 7机器人控制柜应符合以下要求的急停功能:
a) 符合 GB 5226. 1-2008 的 9. 2. 5. 4. 2 的要求;
b)终止所有危险;
C)切断机器人驱动器的驱动源;
d)消除可由机器人控制的任何其他危险;
e)保持有效值直至复位;
f)只能手动复位,复位后不会重启,只允许再次启动。
5.4.8机器人系统如遇突然停电情况,在恢复供电时,具有切断自动运行功能。
5.4.9夹持器在非正常断电、断气的情况下,应仍能保持可靠夹持。
5.4.10机器人使用滑触式、感应式等非直接供电方式时,应具备电压稳定功能和不间断供电功能。
5. 4. 11无线通讯
机器人运动轴采用无线通讯方式时,应满足以下要求:
a)保持通讯连续、稳定、可靠;
b)移动电柜和固定电柜应建立实时信号通断检测机制,确保通讯中断时,机器人能及时停止动作, 发出光或声的报警,并在显示屏上显示相关报警提示内容;
4
JB/T 14402—2021
c)机器人操作及运动前应确保控制柜急停功能有效;
d)调试时应确保机器人速度低于调试人员的反应速度;
e)机器人自动执行过程中,当连续运行动作中途停止或未全部完成时,应先按下急停按钮后,方 可进行手动调整和检查工作;
f)无线通讯方式优先使用光通讯设备和工业级蓝牙通讯设备。
5.5连续运转
机器人在额定负载和工作速度下,连续运行24h,应工作正常。
5.6操作方式
5.6.1手动方式用于机器人慢速运行、编程、维修及功能部件程序验证。
5. 6. 2自动方式应符合以下要求:
a)在选择自动方式前,所有的安全保护参数应全部启用,所有的安全机制应全部有效;
b)在自动方式下,机器人才能启动,启动后自动执行运行程序,且安全措施应起作用;
C)如果检测到任何停机条件,自动操作方式应被阻止;
d)机器人控制台应具有单台运动控制和多台联动控制功能。
5.7机器人与机械加工设备联机信号传输
5.7.1加工设备发给机器人信号指令应包括但不限于以下信息:
--上料请求;
——卸/换料请求;
一一夹具张开完成;
——夹具夹紧完成;
一一机器人服务使能;
——清洗/气吹完成;
..主轴定向完成;
——单机清空。
5.7. 2机器人发给加工设备的信号指令应包括但不限于以下信息:
..上料完成;
..卸/换料完成;
一一夹具张开;
——夹具夹紧;
一一清洗/气吹完成;
..主轴定向;
..机器人服务中;
——单机清空。
5.7. 3机器人与机械加工设备联机信号传输应满足以下要求:
a)收到机械加工设备的服务请求信号开始,至服务完成离开机械加设备的过程中,应确保机器人 在设备内的服务路径畅通无阻;
b)正常情况下,收到由机械加工设备发出的服务请求信号时,应由机器人发出的相关信号应答;乎 C)进入机械加工设备前应满足以下条件:
—应先通过信号(例:机器人服务中)告知机械加工设备,方可进入,通过该信号,锁
5
JB/T 14402—2021
住机械加工设备上可以移动的并移动后可能与机器人发生碰撞的部件;
——应确认收到机械加工设备发出的安全信号(例:机器人服务使能信号),机器人在机 械加工设备内服务的过程中,一旦该安全信号丢失,机器人应立即停止移动。
d)在机械加工设备内服务的过程中,需其内部机构配合动作时,双方交互信号应采用请求-应答 模式,确保机加工设备内每个动作都安全执行到位。
5. 7. 4机器人和机械加工设备的联机流程图2:
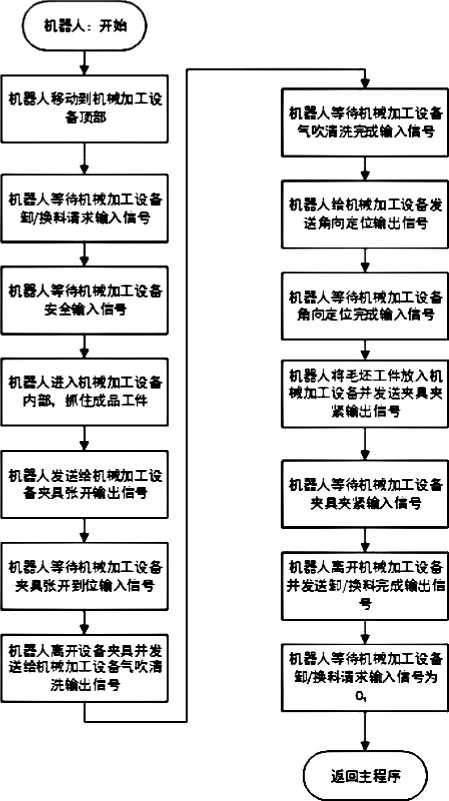
图2机器人和机械加工设备联机流程图
5.8液压系统
使用液压驱动的机器人部件,其液压系统应符合GB/T 3766-2015的规定。
5.9气动系统
使用气压驱动的机器人部件,其气动系统应符合GB/T 7932-2017的规定。
5. 10安全
5. 10. 1机器人的安全应符合GB 11291. 1的规定。
6
JB/T 14402—2021
5. 10. 2 接地
接地应满足以下要求:
a)机器人操作装置、控制柜、动力源均应有接地点,并应标注有接地符号;
b)因绝缘损坏导致机器人金属部件带电的,该部件与接地点之间的电阻不应超过0. 1Q;
C)整机部件单元间增加导电连接装置,保证接地良好。
5. 10.3绝缘电阻
机器人交流动力电源电路与机壳之间的绝缘电阻应大于IOMC。
5. 10.4耐压
机器人动力交流电源电路与邻近的非带电导体间,应能承受交流50Hz,电压有效值1500V,持续InIin 的耐电强度试验,不应出现击穿、闪络及飞弧现象。
5. 10.5短路保护装置
机器人的电源线和外接软线固定装置应安全可靠,应有防水的进线座,并应有短路保护装置。
5.10.6安全保护装置
安全保护装置应满足以下要求:
a)当机器人在工作过程中,出现超负载、超运行速度、超最大行程等故障时,控制系统应能发出 报警信号,且应立即停止工作;
b)机器人移动部件工作区域应设置安全防护装置;
C)机器人在某个区域工作前,应同时具备以下条件:
——在本身的区间信号有效输出;
一一在该区间内的"机器人服务中”信号的有效输出;
注:该区间内设备收到来自机器人的区间信号和服务中信号时,需要断连一切可能与机械手发生碰撞的动作,如伺 服轴的移动、工作台的移动等。
——在该区间内服务时,应准确收到机械加工设备的“允许机器人服务”的安全信号;
注:机器人只有收到该信号后,才可以进入设备内部服务。
d)当所有机械手均处于自动运行状态时,控制系统不允许维修防护门打开(主动防御),当所有 机械手均处于非自动运转状态时,控制系统方能允许维修防护门打开;
e)自动线维修防护门打开时,防护门内机器人应停止运行,程序保持哲停或停止状态,防护门关 闭后,防护内设备应继续保持程序暂停或停止状态,需要人为启动才能继续运行;
f)与防护相关的控制不允许预留屏蔽参数。
5. 10.7限位装置
限位装置应满足以下要求:
a)机器人应有限制各运动轴最大位移的可调机械限位装置;
b)机器人直线轴应具备软限位功能。
5.10.8需要拆分包装的机器人组件应预留吊装工艺装置,满足吊装安全耍求。
5. 11电磁兼容性
7
JB/T 14402—2021
5. 11. 1辐射敏感度
机器人在受到射频干扰时(ISM 1组A级),工作应正常。
5. 11.2磁场敏感度
机器人在3V/m电平值的磁场中(相当于测试级2级),工作应正常。
5. 12噪声
机器人在额定负载和额定速度条件下,运行时所产生的噪声应不大于80dB(A)。
5. 13成套性
成套性应符合以下要求:
a)机器人应包括操作装置、控制柜、动力源装置、连接电缆等成套设备;
b)机器人出厂时,应备有供正常生产使用的附件、维修用的备件及专用工具。
5. 14可靠性
机器人的可靠性用平均无故障工作时间(MTBF)和平均修复时间(MTTR)来衡量,MTBF不小于 5000h, MTTR不大于30min°
5. 15耐振性
机器人的操作装置、控制柜在受到频率5Hz〜55Hz、振幅为0. 15mm的振动干扰吋,工作应正常。
5. 16耐运输性
机器人及附件在包装条件下,应能承受运输颠簸试验而无损坏,试验后,机器人不经修调仍应全面 符合本文件的要求。
6试验方法
6. 1试验条件
试验应在5. 3规定的条件下进行。
6. 2外观和结构
按5. 2的a)〜d)的规定要求宏观目测进行验证。使用百分表、塞尺、卡尺等检具进行e)的检查。
6.3功能试验
6. 3.1用按键、开关对机器人进行动作试验:在额定速度范围内,设定合适的速度、位移等参数。通 过启动、停止,反向运动机器人,进行不少于10次的动作试验。同时按下列要求进行其它功能验证:
a) 按5.4. 1〜5. 4. 6、5. 4. 8〜5. 4. 10的要求进行逐条检验;
b)按5. 8的要求进行检查,液压系统性能应良好,无渗漏现象;
c)按5. 9的要求进行检查,气动系统性能应良好,无泄漏现象。
6. 3.2按5. 4.1 Ia)〜f)的要求进行检查,机器人无线通讯异常时进行报警。
6.4连续运转试验
8
JB/T 14402—2021
按5. 5要求,进行连续运转时间大于24h,机器人系统各功能均应正常。
6,5急停功能试验
对机器人操作实际加工件的动作进行自动编程并运行,进行5次正常循环过程中,观测检查控制功 能,同时人为制造故障,手动急停按钮,检查5. 4.7的a) ~f)要求。同时检查5. 4. 8、5.4.9、5.4. 10的 功能。
6.6重复定位精度试验
同一个位置多次定位产生的误差,按GB/T 17421. 2-2016测量要求,应满足以下测量方法:
a)被测机器人应完成装配并充分运转;在开始检验精度之前,机器人的调平、几何精度和功能检 验都应完全符合要求;检验期间若使用机器人内部补偿程序,应记录在检验报告中;
b) 按机器人编制程序使运动部件沿着或者围绕轴线运动到一系列的目标位置,并在各目标位置
停留足够的时间,以便测量和记录实际位置;
c)每个目标位置的距离可以自由选择,一般应根据技术工艺规范要求,技术工艺要求规定的上卸 料的部位,对矩阵式的上卸料参考图3涂圈位置选择,中位点(A点)、四周最突出点(B、D、 F、H点)应测量;
d) 测量:每个目标位置在每个目标方向上应至少测量5次;
e)测量结果:精度评定是按5次或n次的平均值做统计。
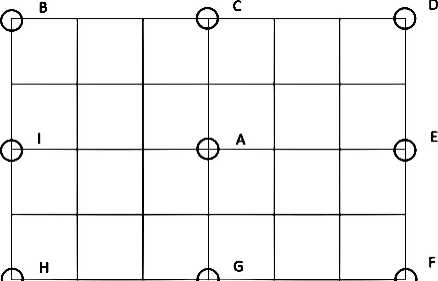
图3矩阵式测量目标位置选择示意图
6.7单轴最大速度试验
水平轴和竖直轴采用快进方式,观察系统操作面板显示水平轴和竖轴最大速度应符合设计文件规定。
6.8抓取额定负载试验
在工业机器人规定的性能范围内,机械接口处能承受的负载值。 测量方法应参考GB/T 12642-2013中6. 6进行试验。
6.9操作方式试验
6. 9.1在手动方式下选择慢速控制方式进行试验,检查5. 6. 1的要求。
6.9.2在自动方式下,机器人执行自动运动程序,按5. 6. 2的a)〜d)要求进行试验,应符合相应的要 求。
6.10机器人和机械加工设备联机传输信号试睑
9
JB/T 14402—2021
按照5. 7. 4机器人和机械加工设备联机流程图2的要求进行以下验证: a)按5. 7. 1的要求进行机械加工设备发给机器人的信号传输验证; b)按5. 7. 2的要求进行机器人发给机械加工设备的信号传输验证; C)按5. 7. 3的要求进行信号传输要求验证。
6. 11安全检验
6. 11. 1接地
按GB 5226. 1-2008中18. 2的规定进行。
6.11.2绝缘电阻试验
按GB 5226. 1-2008中18. 3的规定进行。
6. 11. 3耐压试验
按GB 5226. 1-2008中18. 4的规定进行。
6.11.4短路保护装置检查
按5. 10. 5的规定目测检查。
6. 11.5辐射敏感度检查
按GB/Z 19397—2003中第6章进行试验或供应商提供合格检验报告。
6. 11.6磁场敏感度检查
按GB/Z 19397-2003中第6章进行试验或供应商提供合格检验报告。
6. 11.7安全保护装置检查
按5. 10. 6的规定进行检查。
6. 11.8限位检查
按5. 10. 7的规定进行检查。
6. 11.9吊装装置
按5. 10. 8的规定进行检查。
6.12噪声试验
按GB/T 3768-2017的规定进行噪声试验。
6. 13成套性检查
按5. 13的规定目测检查。
6.14耐振性试验
按JB/T 8896-1999中5. 11的规定进行试验。
6.15可靠性
10
JB/T 14402—2021
按GB/T 5080. 1-2012的规定进行可靠性试验。
6.16耐运输性试验
按JB/T 8896T999中5. 12的规定进行试验。
6.17检验分类
产品检验分出厂检验和型式检验。
6. 18出]-检验
每台机器人都应由质量检验部门进行出厂检验。检验合格后并附有产品合格证方可出厂,产品合格 证应注明产品执行的标准代号,出厂检验项目按表2的规定进行。
6.19型式检验
6. 19. 1有下列情况之一时,应按表2进行型式检验:
a)试制新产品;
b)产品在设计、工艺、使用材料及配套元件有重大变更,可能影响产品性能时;
c)长期不生产,恢复生产时;
d)对成批生产的产品应进行定期抽查,一般为产品累积生产100台进行一次;
e)出厂检验结果与上次型式检验有较大差异时;
f)国家质量监督机构提出要求时。
6.19.2抽样方法及判定原则
在出厂检验合格的产品中,任意抽取2台,经检验如有1台不合格时,则应加倍抽取,重新检验。若 仍有1台不合格,则判该批为不合格。
表2检验项目
|
序号 |
检验项口 |
技术要求 |
试验方法 |
出厂检验 |
型式检验 | |
|
1 |
基本参数 |
重复定位精度_____ |
4.2 |
6.6 |
O |
O ' |
|
2 |
单轴最大速度 |
4.2 |
6.7 |
O |
O | |
|
3 |
抓取额定负荷 |
4.2 |
6.8 |
O |
O | |
|
4 |
外观和结构 _________ |
5.2 |
6.2 |
O |
O | |
|
5 |
功能 |
机器人动作______ |
5.4. 1 |
6. 3. Ia) |
O |
O |
|
6 |
按钮 |
5.4.2 |
6. 3. Ia) |
O |
O | |
11
JB/T 14402—2021
表2续
|
7 |
功能 |
指令动作协调一致 |
5. 4.3 |
6* 3* Ia) |
C | |
|
8 |
显示 |
5. 4.4 |
6. 3. Ia) |
O |
O | |
|
9 |
运行速.度_________ |
5. 4.5 |
6+ 3. Ia) |
C |
O . | |
|
10 |
联机功能_______ |
5. 4.6 |
6. 3. Ia) |
O |
O | |
|
11 |
急停 |
5. 4. 7a) —f) |
6.5 |
O - |
O 一 | |
|
12 |
切断自运行______ |
5. 4.8 |
6. 3. Ia) |
δ |
O | |
|
13 |
夹持器 |
5. 4.9 |
6. 3. Ia) |
O - | ||
|
14 |
稳压和不间断供电 |
5. 4.10 |
6. 3. Ia) |
δ |
δ | |
|
15 |
无线通讯 |
5. 4.1 Ia)〜f) |
6.3.2 |
o |
δ | |
|
16 |
连续运行 |
5.5 |
6.4 |
δ |
δ | |
|
17 |
操作方式 |
5.6 |
6.9 |
o |
o | |
|
18 |
联机信号传输 |
5.7 |
6*10 |
o |
O | |
|
19 |
液压系统______________ |
5.8 |
6. 4. 1b) |
O |
δ | |
|
20 |
气动系统 |
5.9 |
6* 4. 1c) |
O |
o ∙ | |
|
21 |
安全性 |
接地_________ |
5. 10. 2a)〜f) |
6. 11. 1 |
δ |
δ |
|
22 |
绝缘电阻 |
5.10. 3 |
6. 11.2 |
o |
o | |
|
23 |
耐压_________ |
5. 10. 4 |
6. 11.3 |
δ |
δ | |
|
24 |
短路保护 |
5+ 10* 5 |
6. IL 4 |
o - |
o 一 | |
|
25 |
安全保护 |
5. 10. 6a)〜f) |
6. 11. 7 |
δ |
δ | |
|
26 |
限位装置 |
5. l(λ 7a)〜b) |
6. IL 8 |
o |
o | |
|
27 |
吊装装置 |
5. 10. 8 |
6. 11.9 |
δ |
δ | |
|
28 |
辐射敏感度______ |
5+ IL 1 |
6. IL 5 |
— |
o | |
|
29 |
磁场敏感疼______ |
5. 11.2 |
6. 11.6 |
— |
δ | |
|
30 |
噪声 |
5. 12 |
6. 12 |
O |
δ | |
|
31 |
_______成套性_______ |
5. 13 |
6.13 |
C |
o | |
|
32 |
________可靠性________ |
5. 14 |
6.15 |
— |
δ | |
|
33 |
耐振性 |
5. 15 |
6.14 |
— |
o | |
|
34 |
_______耐运输性_______ |
5. 16 |
6. 16 |
— |
δ | |
|
注:为检验________________________________________________ | ||||||
7标志、包装、运输和贮存
7.1固定标牌
机器人产品上应有固定标牌,内容包括:
a)产品名称;
b)产品型号;
C)驱动源参数及耗电功率;
d)出厂编号;
e)制造单位名称;
f)出厂日期;
12
JB/T 14402—2021
g)重量。
7. 2包装标志
包装箱外表面图示标志应符合CB/T 191-2008的规定。
7.3包装
7.3.1机器人在包装前,必须将活动部分固定牢靠,外露易损坏零件拆下放置在安全位置。
7. 3. 2 包装材料应符合 CB/T 4768-2008、GB∕T4879-2016, GB/T 5048-2017 的规定。
7.3.3包装箱内应有下列文件:
a)特性数据表和产品合格证;
b)使用说明书和安装图;
c)随机备件、附件及其清单;
d)装箱清单。
7.4运输
机器人在运输过程中应防潮、防腐蚀,不应倒置和摔落。
7.5贮存
机器人应贮存在(TC〜40℃、干燥、通风的环境中,空气中不得含有腐蚀性介质,相对湿度不得大 于85%,其周围环境无易燃气体,无强烈机械振动、冲击及强磁场作用。
13